

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В данной задаче т—п переменных могут быть выбраны произвольно, в частности взяты равными нулю. Это дает возможность проиллюстрировать задачу геометрически в т—п-мерном пространстве Ет-п. В этом пространстве каждой точке Х(r) соответствует совокупность чисел xr1,....., xrт—п равных проекции вектора, проведенного из начала
координат в точку Х(r), на координатные оси пространства Ет-п.
Функция F(x1, ..., хт) в каждой точке пространства имеет определенное значение, следовательно, пространство Ет-п является скалярным полем критерия оптимальности F(Х) и функций ограничений θi(Х). Функциям ограничений (9.6) соответствуют граничные гиперповерхности (в частном случае — гиперплоскости). Ограничениям (9.7) соответствуют гиперплоскости, выделяющие в пространстве определенную пространственную область. Если ограничения (9.6) и (9.7) представляют собой выпуклую область, то решения задачи оптимизации будут соответствовать такой точке этой области со скалярным полем критерия F(X), в которой критерий F(X) принимает минимальное значение. Поясним вышесказанное на примере.
Пример 9.1. Имеется следующая задача нелинейного программирования: минимизировать целевую функцию
F(X) = х1-х2, (9.9)
при ограничениях
 (9.10)
(9.10)
Введя дополнительные переменные х3, х4 и х5, (9.10) превратим в систему уравнений, которую разрешим относительно этих введенных переменных. При этом получим
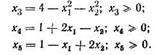 (9.11)
(9.11)
В данной задаче число переменных т = 5, число уравнений п = 3, тогда т—п=2, что дает возможность дать геометрическую интерпретацию задачи в пространстве Е2, т. е. на плоскости.
Поскольку все переменные должны быть положительными:
хj≥0, j=1,2,3,4,5 (9.12)
каждое из неравенств (9.12) определяет некоторую допустимую область в пространстве Е2. Так, неравенство х1≥0 определяет верхнюю полуплоскость, неравенство х4≥0— полуплоскость, лежащую по одну сторону от прямой 2х1—х2+1=0, а именно ту, которая содержит начало координат. Область, соответствующая x4<0, является запрещенной, и ее удобно отметить (на рис. 9.1, а она отмечена штриховкой).
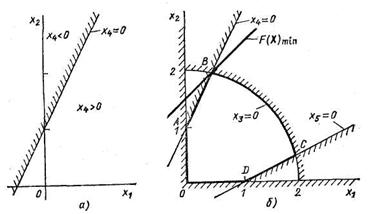
Рис. 9.1. Допустимая и запрещенная полуплоскости (а) и область существования задачи нелинейного программирования (б)
Подобные построения для всех xi приведены на рис. 9.1, б. Областью существования задачи является область OABCD. В рассматриваемом примере функция (9.9) принимает минимальное значение на границе допустимой области в точке В.
Отметим ряд особенностей задачи нелинейного программирования с нелинейной целевой функцией. В общем случае заранее нельзя сказать о расположении точки, в которой функция F(X) принимает максимальное или минимальное значение. Эта точка может находиться как на границе допустимой области, так и внутри нее. Функция F(X) может достигнуть экстремального значения как в одной точке, так и на некотором множестве (гиперлинии или гиперповерхности).
Другая особенность задачи математического программирования состоит в том, что в общем случае нелинейная целевая функция F(X) может иметь несколько локальных экстремумов в допустимой области, включая ее границу. Поэтому при оптимальном консультировании возникает проблема определения глобального экстремума задачи оптимизации, что в практических задачах консультирования нередко вызывает значительные трудности при вычислениях.
В общем виде задача нелинейного программирования пока не имеет строгого математического решения. Однако в связи с тем что данный класс задач довольно часто встречается в практических задачах консультирования, разработано большое число методов и эвристических алгоритмов решения конкретных задач нелинейного программирования.
9.2. Структурный синтез и параметрическая оптимизация формируемых рекомендаций
Задача синтеза формируемых рекомендаций включает в себя создание структуры КП и расчет ее параметров. Эти две части синтеза будем называть структурным и параметрическим синтезом формируемых рекомендаций.
Структурный синтез. Задача структурного синтеза заключается в поиске оптимальной или рациональной структуры (схемы) КП для реализации заданных функций в рамках выбранного принципа действия. Результаты структурного синтеза могут быть представлены в виде перечня элементов вместе с таблицей соединений (связей), схемы расположения элементовв в линейном эвклидовом пространстве с указаниями их типов, схемы алгоритмов и т. п.
Задачи структурного синтеза относят к задачам консультирования, наиболее сложным с точки зрения возможностей формализации. Сложность формализованного синтеза структур заключается прежде всего в наличии большого числа факторов, влияющих на разновидности, свойства и параметры синтезируемых структур, а также в трудностях решения задач оптимизации большой размерности при высокой степени детализации описания синтезируемых рекомендаций.
Так, при синтезе рекомендаций по созданию структур специализированных ЭВМ и микропроцессорных систем возникают трудности решения ряда специфичных проблем, связанных с согласованием структур и алгоритмов функционирования ЭВМ и систем с характеристиками решаемых задач. Результатами структурного синтеза ЭВМ являются рекомендации по номенклатуре входящих в состав ЭВМ блоков, число блоков каждого типа, топология информационных и управляющих взаимосвязей между блоками, а также расписание функционирования каждого блока при организации вычислительного процесса.
Большая размерность консультационных задач КП делает целесообразным блочно-иерархический подход, при котором консультационный процесс разбивается на взаимосвязанные иерархические уровни. Формирование рекомендаций по структурному синтезу составляет существенную часть консультационного процесса и также организуется по блочно-иерархическому принципу. Это означает, что синтезируется не вся сложная рекомендация целиком, а на каждом уровне в соответствии с выбранным способом декомпозиции синтезируются определенные функциональные блоки рекомендации с соответствующим уровнем детализации. Можно предложить различные способы классификации задач формирования рекомендаций на стадии структурного синтеза. Так, в частности, в зависимости от стадии консультирования будем различать следующие процедуры структурного синтеза: выбор основных принципов функционирования КП, формирование рекомендации в рамках заданных принципов функционирования, выпуск технической документации. В зависимости от типа синтезируемых структур будем различать задачи одномерного, схемного и геометрического синтеза. В зависимости от возможностей формализации будем различать задачи, в которых возможен полный перебор сформированных рекомендаций, задачи, которые не могут быть решены путем полного перебора за приемлемое время, задачи поиска вариантов рекомендаций по синтезу структур в счетном множестве допустимых вариантов и задачи синтеза, решение которых является проблематичным.
В самом общем случае для решения задачи необходим перебор вариантов рекомендаций, и сокращение перебора является актуальной проблемой. Иерархический подход уменьшает число вариантов рекомендаций на каждом уровне и делает решение задачи определения оптимальной структуры КП реальным.
Отметим существенное различие между консультационными задачами синтеза оптимальных структур и задачами анализа качества структур КП. В анализе необходимо убедиться, что решение существует, а численные методы анализа устойчивы. При структурном синтезе не гарантировано даже существование номинальной структуры, удовлетворяющей всем требованиям КЗ на КП. Существующие и разрабатываемые ММ синтезируемых КП, как правило, оказываются довольно чувствительными к начальным условиям, к размерности задачи оптимизации, к виду целевых функций и ограничений. Поэтому необходимым условием для решения задач синтеза оптимальных рекомендаций по синтезу структур КП различной природы является использование методов и средств автоматизированного консультирования. Естественно, что формализованные модели и методы для САК, с одной стороны, должны характеризоваться высокой степенью общности и достоверности, а с другой стороны, должны быть разрешимыми с вычислительной точки зрения.
Существо получения ММ КП для решения задач структурного синтеза поясним на примерах компоновки, размещения и трассировки, довольно часто встречающихся в задачах конструирования ЭВА, распределения оборудования по производственным цехам, размещения цехов по территории завода, при проектировании линий электропередачи транспортных средств и т. п.
Пример 9.2. Задача компоновки. Под задачами компоновки понимают задачи разбиения множества D = {d1, ..., dn} из п элементов на ряд непересекающихся подмножеств Dk, k=1,2,…,N, чтобы при этом выполнялись заданные ограничения и достигался экстремум некоторой функции качества F(X).
При заданном числе N подмножеств разбиения задача компоновки формулируется следующим образом:
F(X)→min;
![]() (9.13)
(9.13)
где Dk D — множество элементов, принадлежащих k-му подмножеству разбиения.
Общее число разбиений

при условии, что мощность каждого подмножества Dk является заданной, т. е.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
