

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Поэтому для решения консультационных задач оптимизации при консультировании проблем с дискретными значениями параметров методы оптимизации непрерывных объектов непосредственно неприменимы. Эти задачи относятся к задачам дискретного программирования. Если при оптимизации часть параметров дискретна, а часть имеет непрерывный характер, то задача должна решаться методами частично дискретного программирования. Из-за недифференцируемости выходных параметров в задачах дискретного программирования довольно часто возникают трудности при вычислениях.
Рассмотрим пример задачи параметрического синтеза.
Пример 6.5. Формирование рекомендаций на проектирование трехстержиевой фермы. Цель проектирования — выбор конструкции трехстержневой фермы (рис. 9.2) минимальной массы.
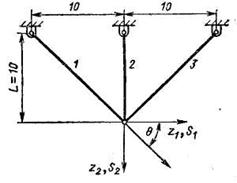
Рис. 9.2. Трехстержневая ферма
Проектирование сводится к выбору площадей поперечных сечений отдельных стержней х1, х2 и х3 (переменные проектирования), так чтобы ферма была по возможности легкой и удовлетворялись ограничения на напряжение, устойчивость при продольном изгибе, смещение и размеры стержней.
Целевая функция F(X) представляет собой массу конструкции (при θ = 45°):
 (9.27)
(9.27)
где pg — плотность материала, из которого изготовлена ферма.
Горизонтальное и вертикальное смещения z1 и z2 общего узла получены из линейных соотношений теории упругости. Для данной конструкции эти уравнения имеют вид
K(х)Z — S = 0, (9.28)
гдe Z=[z1, z2]T;
 (9.29)
(9.29)
— положительно определенная матрица жесткости и вектор нагрузки соответственно; Е — модуль Юнга; θ —угол приложения нагрузки, отсчитываемый от горизонтали.
Вычисляя деформации ε в зависимости от смещения узла и применяя закон Гука, найдем напряжение в каждом стержне:
![]() (9.30)
(9.30)
С помощью допустимых напряжений

определенных для каждого стержня, ограничения на напряжения примут вид
![]() (9.31)
(9.31)
![]() (9.32)
(9.32)
![]() (9.33)
(9.33)
Чтобы наложить ограничения по устойчивости, необходимо задать вид зависимости момента инерции от площади поперечного сечения для каждого стержня. Общей при инженерных расчетах является зависимость вида I=βх2, где β— безразмерная постоянная. Подобная зависимость получается, если зафиксировать форму поперечного сечения и все его размеры менять в одинаковой пропорции. Осевые усилия имеют вид Фi=σixi, i=1,2,3, растяжения стержней считаются положительными. Ограничения по устойчивости имеют вид
 (9.34)
(9.34)
Используя равенства (9.28), можно записать:
 (9.35)
(9.35)
Ограничения на смещения могут быть сформулированы в виде
 (9.36)
(9.36)
где z1(0) и z2(0)—заданные верхние границы для z1 и z2 соответственно. Наконец, требуется, чтобы площади поперечных сечений были неотрицательны, так что следует наложить ограничения
— x1 ≤ 0, — х2 ≤0, — х3 ≤0. (9.37)
Теперь задачу проектирования можно рассматривать как задачу выбора таких переменных проектирования х1, х2 и х3, которые минимизируют F(X) и удовлетворяют ограничениям (9.28), (9.31) — (6.37).
Заметим, что смещения z1 и z2 играют в данной формулировке важную роль. Их определяют из уравнения для конструкции (9.28), коль скоро заданы переменные проектирования. Эти переменные представляют собой отклик системы на приложенную нагрузку, их называют переменными состояния, а уравнения (9.28) — уравнениями состояния.
9.3. Разновидности консультационных задач оптимизации
В задачах оптимального формирования рекомендаций по решению задач консультируемых проблем вектор переменных консультирования X = {х1,... ...,хп) выбирают в результате определения экстремума целевой функции F(X) в допустимой области, заданной системой ограничений на параметры консультируемой проблемы. В самом общем виде целевая функция и ограничения являются нелинейными функциями переменных консультирования X.
Задачи, в которых экстремум ищут в пределах неограниченного пространства переменных консультирования, относятся к задачам безусловной оптимизации. Найденные при чтом экстремумы называют безусловными. Наличие ограничений любого вида приводит к задачам условной оптимизации, решение которых дает условный экстремум.
При решении задач оптимизации первоначально проверяют условия, которым должен удовлетворять вектор переменных консультирования X, минимизирующий (максимизирующий) критерий качества F(X). Эти условия проверяют для отыскания стационарных точек, среди которых находится искомый вектор X.
Функция F(X), определенная в Ет, имеет абсолютный минимум в Х*![]() Ет, если
Ет, если
F(X*)≤F(X) (9.38)
для всех Х![]() Ет. Минимум является строгим, если в (9.38) стоит знак строгого неравенства для Х≠Х*.
Ет. Минимум является строгим, если в (9.38) стоит знак строгого неравенства для Х≠Х*.
Функция F(X) имеет в X* относительный минимум, если существует ε>0 такое, что для любой точки Х![]() Sε(X*) выполняется неравенство
Sε(X*) выполняется неравенство
F(X)- F(X*)>0, (9.39)
где Sε(X*) —окрестность точки X*. При определении максимума F(X) (9.39) должно быть заменено на неравенство
F(X)— F(X*)<0.
Еели F(X) имеет в точке X* абсолютный минимум, то эта функция имеет там также и относительный минимум. Обратное не обязательно верно. Часто относительный минимум называют локальным, а абсолютный минимум — глобальным.
Рассмотрим необходимые и достаточные условия экстремума. Классические методы оптимизации используют тогда, когда известно аналитическое выражение функции F(X) и известно, что она по крайней мере дважды дифференцируема по переменным консультирования. Тогда для определения экстремума будем использовать необходимые и достаточные условия безусловного экстремума. Эти условия легко получить с помощью разложения F(X) в окрестностях экстремальной точки X* в ряд Тейлора:
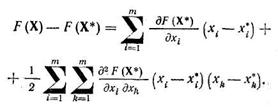 (9.40)
(9.40)
Если X* — точка максимума, то линейные члены в (9.40) равны нулю, тогда равны нулю составляющие вектора—градиента функции F(X). Следовательно, необходимым условием экстремума является условие
grad F(X) = 0,
где

Все точки, где выполняется это условие, называются стационарными.
Достаточное условие максимума на основании (9.39) и (9.40) заключается в том, что сумма членов со вторыми частными производными должна быть отрицательной при любых Х![]() Sε(X*), т. е.
Sε(X*), т. е.
(∆Х)ТГ(∆Х)<0, (9.41)
где ∆Х =Х—X* — вектор-столбец; ((∆ХТ=(X—Х*)Т — вектор-строка);

— матрица Гессе; Т — знак транспонирования матрицы.
Условие (9.41) есть достаточное условие максимума. Матрицу Г, удовлетворяющую условию (9.41) при любых ∆Х, называют отрицательно определенной, а в случае (∆Х)тГ(∆Х)>0 для любых ∆Х — положительно определенной. Поэтому достаточные условия экстремума можно представить как требование отрицательной определенности матрицы Гессе для максимума или положительной определенности для минимума в экстремальной точке.
Если достаточные условия не выполняются, то имеем не экстремальную, а седловую точку.
При наличии ограничений на переменные консультирования X решение задачи оптимизации ищут в некоторой допустимой области S согласно следующему направляющему принципу. Если F(x1...,xm) является функцией нескольких переменных, определенных на допустимой области S, то максимальное значение F(X), если оно существует, достигается в одной или более точках, которые могут принадлежать следующим множествам:
К1 = {( х1,...,хт) | (х1,...,хт) —точка в области S, в которой функция F стационарна};
К2={( х1,...,хт) | (х1,...,хт)— точка границы области S};
К3={(х1,...,хт) | —функция F(X) не дифференцируема в точке (х1,...,хт)}.
На рис. 9.3 приведен пример геометрической интерпретации многоэкстремальной задачи оптимального консультирования.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
