

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При представлении макромодели логического элемента в схемной форме ее типичная структура имеет вид, показанный на рис. 8.5.
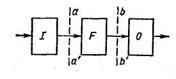
Рис. 8.5. Структура модели логического элемента
Входной блок I отражает входные характеристики схемы, выходной блок О — выходное сопротивление, блок F — функциональные преобразования сигналов и задержку их распространения. Передача сигналов через линии а—а' и b—b' происходит только в направлении слева направо.
Метод однонаправленных моделей применяется при выделении фрагментов в схеме в соответствии со следующими правилами:
1) границы фрагментов проходят через схемы однонаправленных моделей по линиям а—а' или b—b';
2) контур любой обратной связи должен полностью находиться в пределах одного фрагмента.
После выделения фрагментов необходимо их ранжирование — упорядочение в соответствии с последовательностью прохождения сигналов. Ранг 1 получают фрагменты, на входы которых поступают только внешние воздействия. Ранг 2 получают фрагменты, на входы которых поступают сигналы с выходов фрагментов ранга 1 и, возможно, также внешние воздействия, и т. д. Другими словами, ранг r присваивают фрагменту, на входы которого поступают сигналы с выходов только ранжированных фрагментов (внешние воздействия рассматриваются как сигналы с выходов фрагментов ранга 0), причем старший из рангов предшествующих фрагментов равен r—1.
После фрагментации и ранжирования выполняют раздельное численное интегрирование подсистем дифференциальных уравнений, относящихся к различным фрагментам в порядке увеличения их рангов. Интегрирование выполняют на всем заданном отрезке интегрирования Ткон. При интегрировании уравнений фрагмента с рангом r в качестве входных воздействий используют результаты интегрирования уравнений фрагментов с более низкими рангами.
Раздельное интегрирование позволяет организовать вычисления в каждом фрагменте с оптимальным для фрагмента значением шага, что может привести к значительной экономии вычислительных затрат. Однако метод однонаправленных моделей имеет ограниченное применение из-за необходимости соблюдения указанных правил фрагментации. Эти ограничения устраняются в методе РФС.
Метод РФС является итерационным методом раздельного интегрирования дифференциальных уравнений. Условие однонаправленности моделей снимается благодаря введению фрагментации схем с перекрытием, поясняемой рис. 8.6.
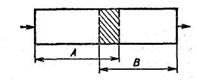
Рис. 8.6. Фрагментация схемы с перекрытием
Заштрихованный участок соответствует подсхеме, включаемой при раздельном интегрировании и в фрагмент A, и в фрагмент В. Чем шире зона перекрытия, тем точнее учитывается нагрузка для фрагмента А и точнее рассчитываются входные сигналы для фрагмента В. Если в схеме нет межфрагментных обратных связей, то достаточно ранжирования фрагментов и выполнения одной итерации пофрагментного интегрирования на интервале [0, Ткон]. При наличии межфрагментных обратных связей требуется выполнение нескольких итераций, с помощью которых форма сигналов на выходах фрагментов приближается к истинной (происходит релаксация формы сигналов).
Очевидно, что выполнение пофрагментного интегрирования на всем заданном интервале [0, Ткон] может привести к излишне большому числу итераций и к колебаниям фазовых переменных в процессе релаксации с излишне большой амплитудой, что потребует значительных затрат машинного времени. Во избежание этих неприятностей можно использовать метод прогнозируемой реакции. В отличие от метода РФС здесь пофрагментное интегрирование производится на отрезках [tk, tk+Hj], где Hj — шаг прогноза, соизмеримый с длительностью задержки прохождения сигнала по j-му контуру обратной связи. Значение Hj определяют автоматически аналогично тому, как рассчитываются значения шагов интегрирования.
Комбинироиннные методы и алгоритмы анализа. При решении консультационных задач анализа в САК получает достаточно широкое распространение временнóе комбинирование численных методов. Наиболее известны рассмотренные выше алгоритмы ФНД для численного интегрирования ОДУ, являющиеся алгоритмами комбинирования формул Гира. Другим примером временного комбинирования методов служат циклические алгоритмы неявно-явного интегрирования ОДУ. В этих алгоритмах циклически меняется формула интегрировании—следом за шагом неявного интегрирования следует шаг явного интегрировании. В бизовом алгоритме
неявно-явного интегрировании используют формулы первого порядки точности — формулы Эйлера. Такой комбинированный илгоритм оказывается реализацией А-устойчивого метода второю порядка точности, повышение точности объясняется взаимной компенсацией локальных методических погрешностей, допущенных на последовательных неявном и явном шагах. Следует отметить, что в качестве результатов интегрирования принимаются только результаты неявных шагов, поэтому в алгоритме комбинированного неявно-явного интегрирования устраняются ложные колебания, присущие наиболее известному методу второго порядка точности— методу трапеций.
Комбинирование неявных и явных формул интегрирования применяют для повышения эффективности решения нестационарных двумерных задач на микроуровне в рамках метода, называемого методом переменных направлений. Если на очередном временном шаге использовать неявные формулы аппроксимации производных по обеим пространственным координатам х1 и х2, то потребуется решать систему конечных уравнений порядка рq, где р и q — уменьшенное на единицу число участков дискретизации по осям х1 и х2. Однако можно циклически менять характер аппроксимации, например на i-м временном шаге для производных по х1 использовать неявную, для производных по х2 — явную формулы, а на (i +l)-м шаге, наоборот, для производных по х1 — явную, для производных по х2 — неявную формулы. Тогда на каждом шаге по времени нужно решать q систем уравнений порядка р или р систем уравнений порядка q.
Учет латентности фрагментов. Локальные погрешности интегрирования зависят от значения шага интегрирования h и от характера переходных процессом. Если фазовые переменные претерпевают быстрые изменения, то погрешность не выше заданной обеспечивается при малых h. Если же фазовые переменные меняются медленно, то значения h при тех же погрешностях могут быть существенно больше. В сложных схемах консультируемых проблем, как правило, большинство фрагментов в любой момент времени относится к неактивным (латентным), т. е. к таким, в которых не происходит изменений фазовых переменных, причем отрезки латентности Тлат могут быть довольно продолжительными. В латентных фрагментах допустимо увеличивать шаг интегрирования вплоть до значения Тлат, что эквивалентно исключению уравнений фрагментов из процесса интегрирования на период их латентности. Такое исключение выполняется в алгоритмах учета латентности, относящихся к алгоритмам событийного моделирования. Основу этих алгоритмов составляет проверка условий латентности. Примером таких условий может служить
||∆V||<ε, (8.102)
где ∆V — вектор изменений фазовых переменных; ε — малая положительная константа.
При проверке (8.102) у нелатентных фрагментов в вектор ∆V входят изменения как внешних, так и внутренних переменных фрагмента, и если условие (8.102) выполняется на протяжении нескольких шагов интегрирования подряд, то фрагмент включается в группу латентных. При проверке (8.102) у латентных фрагментов вектор ∆V состоит из изменений только внешних фазовых переменных, происшедших за время с начала латентности, и фрагмент исключается из числа латентных, если условие (8.102) нарушается.
Следует отметить, что в таких методах, как РФС, латентность учитывается естественным образом, в них не требуется специальных проверок статуса латентности фрагментов.
Адаптивное моделирование. Адаптивное моделирование — метод автоматического выбора подходящих моделей для фрагментов в процессе анализа сложной консультируемой проблемы. Метод адаптивного моделирования составляют способы решения следующих основных вопросов:
1. Фрагментация.
2. Критерий смены моделей.
3. Определение начальных значений переменных во включаемых моделях.
Рассмотрим один из возможных вариантов метода адаптивного моделирования. В нем используются модели трех уровней сложности: Ml — простейшая макромодель фрагмента; М2 — промежуточная по сложности макромодель, в которой блоки I и О (см. рис. 8.5) адекватно отражают входные и выходные цепи схемы, М3 — полная модель фрагмента. Модели Ml и М2 имеют блочную структуру (см. рис. 8.5). Фрагментацию используют двоякую: во-первых, функциональную фрагментацию, выделяющую фрагменты, которым соответствуют сменяемые модели; во-вторых, диакоптическую фрагментацию, выделяющую раздельно интегрируемые фрагменты. Диакоптическая фрагментация выполняется с перекрытием, зону перекрытия составляют блоки I макромоделей. При функциональной фрагментации нужно стремиться к получению максимально возможного числа типовых фрагментов, под которыми понимаются фрагменты, для которых заранее разработаны и включены в библиотеку макромодели типов Ml и М2 вместе с рассчитанными для макромоделей типа Ml областями адекватности (ОА). Диакопгический фрагмент есть функциональный фрагмент вместе с зоной перекрытия, которой соответствует блок I из модели схемы-нагрузки.
Предполагается, что анализ начинается при представлении всех фрагментов моделями Ml. При дальнейшем анализе возможны замены моделей Ml моделями М3. Такие замены выполняются для тех фрагментов, в которых происходит нарушение условий адекватности, обнаруживаемое при выходе вектора внешних переменных фрагмента за пределы ОА. Одновременно с включением полной модели М3 для некоторого фрагмента А происходит замена блоков О в моделях схем, являющихся источниками сигналов для фрагмента А, и замена блоков I в моделях схем, являющихся нагрузками для фрагмента А. Эта замена — включение блоков из моделей М2 вместо блоков из моделей Ml,

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
