

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
∆ (G1, G2) = |![]() G1(x)dx) –
G1(x)dx) – ![]() G2 (x) dx | = |
G2 (x) dx | = |![]() (G1(x) –G2 (x)) dx |.(10.160)
(G1(x) –G2 (x)) dx |.(10.160)
В этом случае расстояние между порождающими функциями G1 (t) и G2 (t) определяется как площадь фигуры R и отлично от нуля. Однако, если допускается пересечение графиков функций G1 (t) и
G2 (t), правило (10.159) не удовлетворяет аксиоме тождества. Для получения окончательного правила определения расстояния, удовлетворяющего всем необходимым аксиомам, примем
∆ (G1, G2) =![]() |G1(x) — G2(x)|dx,
|G1(x) — G2(x)|dx,
т. е. определим расстояние как площадь фигуры, ограниченной графиками функций G1 (t), G2 (t). Такое расстояние достаточно естественно: если G1 (t) > (<) G2 (t) на [0, 1], оно совпадает с разностью субъективных н-обобщенных потерь. В то же время, для любых
G1 (t), G2 (t) S можно записать:
∆ (G1, G2) = 0![]() G1(t) = G2(t),
G1(t) = G2(t),
![]() t [0, 1];
t [0, 1];
∆ (G1, G2) =∆ (G2, G1) ;
∆ (G1, G3) ≤∆ (G1, G2) +∆ (G2, G3) .
Два первых свойства очевидны. Докажем третье. Для этого запишем
|G1(х)-G3(x)|=|G1(x)-G2(x)+G2(x) – G3(x) ≤| G1 (x) - G2 (x) |+|G2(x) - G3 (x)|,
откуда
![]() | G1(x ) — G3(x)|dx≤
| G1(x ) — G3(x)|dx≤![]() |G1(x)-G2(x)|dx+
|G1(x)-G2(x)|dx+![]() | G2(x) - G3(x) | dx,
| G2(x) - G3(x) | dx,
т. e.
∆ (G1, G3) ≤ ∆ (G1, G2)) + ∆ (G2, G3).
При полученных условиях построение ε-сети в S сводится к задаче оптимизации стратегии гарантирующей многоцелевой системы
<S, S, ∆(G1, G2)>. В этой многоцелевой системе множество порождающих функций является и множеством неопределенности, и множеством стратегий. Отыскиваем n-элементную стратегию А S, обеспечивающую минимум функционалу, который определяет наибольшее расстояние от любых порождающих функций G (t) S до ближайших к ним порождающих функций из стратегии А. Заменим порождающие функцииих кусочно-линейными аппроксимациями. Для этого разобьем отрезок [0, 1 ] оси t на п + 1 равную часть точками ti,
i = 0.....п + 1, t0 = 0, tn+1 = 1, t i > tK при i > к и обозначим значения типовой и «истинной» порождающих функций в этих точках соответственно через уi и xi, i = 0, ..., п + 1:
y0=x0 = 0, yn+1=xn+1 = 1.
Тогда «истинная» порождающая функция определяется n-мерным вектором х = (х1, ..., хп).
Допустимые «истинные» порождающие функции являются точками области X n-мерного пространства, описываемой условиями
0≤ хi ≤ xi+1 ≤ 1, i = 1, ..., n — 1. Аналогично типовые порождающие функции описываются n-мерными векторами у=(y1, ..., yп), принадлежащими области Y n-мерного пространства, задаваемой условиями:
0≤ yi ≤ yi+1 ≤ 1, i = 1, ... , n— 1
В соответствии с моделью МСК область X является внешним множеством МСК, область Y — множеством стратегий, а искомый набор т типовых порождающих функций определяет m-элементную стратегию А = {yj}j=1.....m Y. В качестве функции локальной эффективности примем интегральную ошибку при замене «истинной» порождающей функции х (t) на типовую у (t):
f{x,y)= ![]() |x(t)-y(t)|dt.
|x(t)-y(t)|dt.
С учетом введенной аппроксимации
f (х, y) = ![]()
![]() |x(t)-y(t)|dt =
|x(t)-y(t)|dt = ![]() K(хi , yi, xi+1 , yi+1), (10.161)
K(хi , yi, xi+1 , yi+1), (10.161)
где
K(хi , yi, xi+1 , yi+1)= ![]() |x(t)-y(t)|dt (10.162). Для вычисления интеграла (10.162) рассмотрим различные варианты взаимного расположения типовой и «истинной» порождающих функций на отрезке [ti, ti+1] (рис. 10.47).
|x(t)-y(t)|dt (10.162). Для вычисления интеграла (10.162) рассмотрим различные варианты взаимного расположения типовой и «истинной» порождающих функций на отрезке [ti, ti+1] (рис. 10.47).
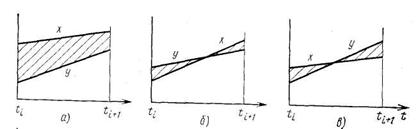
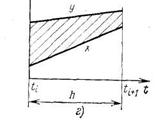
Рис. 10.47. Варианты взаимного расположения «истинной» и типовой порождающих функций:
![]()
Значение вычисляемого интеграла для каждого варианта, очевидно, равно площади заштрихованной фигуры. Соответствующие выкладки проводятся достаточно просто, их результаты, определяющие
K(хi , yi, xi+1 , yi+1), сведены в табл. 10.4.
Таблица 10.4
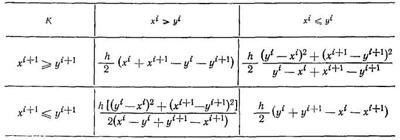
Показатель эффективности МСК естественно выбрать в виде
f(X, А, Е(х))= f(x,yj), yj![]() A.
A.
Тогда он оценивает гарантированную ошибку при наилучшей замене «истинной» порождающей функции на функцию из типового набора.
Итак, задача определения типового набора функций учета неопределенности сведена к оптимизации стратегии ГМСК при функции локальной эффективности вида ρ(х, у).
Она решается общим алгоритмом оптимизации МСК. Прежде чем переходить к описанию полученных результатов, исследуем эту задачу с использованием наглядных графических приемов. Это позволяет определить ее качественную специфику, а также получить эффективное начальное приближение и использовать в общем алгоритме оптимизации МСК быстро работающие алгоритмы улучшения и распределения.
Примем п = 1, полагая, что в точках t = 0 и t = 1 порождающие функции могут принимать любые значения от 0 до 1. Это равносильно разбиению отрезка [0, 1 ] оси t на три неравные части, две из которых (крайние) неограниченно уменьшаются (рис. 10.48).
Рис. 10.48. Аппроксимация порождающей функции трехзвенной ломаной
В этом случае соотношение (10.161) совпадает с К (х1, у1, х2, у2) и задача сводится к оптимальному «покрытию» треугольника, изображенного на рис. 10.49, фигурами, определяемыми линиями уровня функции К (х1, у1, х2, у2) (рис. 10.50).
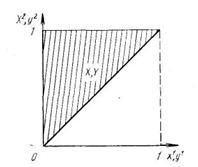
Рис. 10.49. Внешнее множество X и множество Y при формировании
типового набора допустимых способов учета неопределенности
(аппроксимация порождающей функции при n = 1, 2)
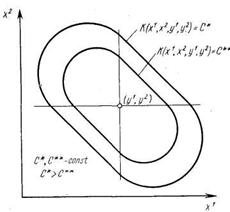
Рис. 10.50. Линия уровня функции локальной эффективности при n = 1
Отметим, что при деформации плоскости (х1, х2) — сжатии в 2 раза в направлении биссектрис 2-го и 4-го квадрантов — эти линии уровня близки к окружностям (рис. 10.51), поэтому окончательно можно рассматривать оптимальное покрытие рассматриваемого равнобедренного треугольника с гипотенузой √2 и высотой ![]() кругами.
кругами.
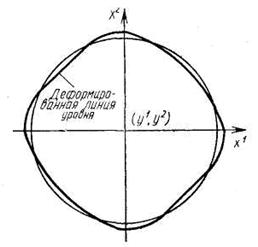
Рис. 10.51. Линия уровня функции локальной эффективности при
n = 1 на деформированной плоскости
Результаты решения такой задачи показаны на рис. 10.52 и 10.53.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
