

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

где ak — число ребер, соединяющих вершину xk со всеми невыбранными вершинами графа G.
Строят множество вершин Гxj, смежных xj, и процесс выборки вершин G1 повторяют. Образованный подграф G1 исключают из исходного и получают граф G*=(X*, U*), где X* X\X1, U* = U\U1. Далее в графе G* выбирают вершину с наибольшей локальной степенью, включают ее в G2 и процесс повторяют до тех пор, пока граф G не будет разрезан на l частей.
Первоначальную компоновку можно улучшить с помощью итерационных алгоритмов, основанных на реализации методов парных или групповых перестановок элементов из одной части схемы в другую таким образом, чтобы улучшилось значение целевой функции с учетом заданных ограничений.
Задача размещения заключается в определении оптимального (с точки зрения выбранного критерия оптимальности) положения элементов и связей между ними в монтажном пространстве типовой конструкции с учетом заданных конструктивно-технологических ограничений. Исходными данными в задаче решения являются принципиальная электрическая схема узла или устройства, метрические параметры и топологические свойства монтажного пространства.
Главная цель размещения — создание наилучших условий для трассировки с учетом обеспечения тепловых режимов и электромагнитной совместимости электрорадиоэлементов. Несмотря на обилие существующих критериев размещения (минимума пересечений, минимума суммарной длины соединений и т. д.) истинной целью размещения компонентов является максимальное упрощение процесса трассировки соединений, т. е. достижение минимального числа непроведенных трасс. При размещении п электрорадиоэлементов в регулярном монтажном пространстве с числом позиций т общее число размещений N(n, m) определяется как
N(n,m) = n!Cnm =т!1(т — п)!.
В связи с этим поиск оптимального размещения с помощью перебора нецелесообразен уже при п>15.
Имеется много разновидностей последовательных алгоритмов размещения. Основной идеей этих алгоритмов является идея упорядочения электрорадиоэлементов по определенным признакам. Сначала устанавливают очередность электрорадиоэлементов, а затем для каждого из них определяют наилучшую позицию по выбранному критерию, например по суммарной длине связей с уже размещенными компонентами. Затем процесс повторяют для оставшихся компонентов и свободных позиций. Связность размещаемых элементов задается матрицей смежности R графа G=(X, U). Для выбора размещаемого элемента используют различные оценки степени связности.
Пусть на k-м шаге алгоритма размещено Ik ![]() I элементов, тогда
I элементов, тогда
I′k = I\Ik — множество еще не размещенных элементов. Основными правилами для выбора элемента на (k+1)-м шаге алгоритма являются:
а) максимум суммарной связности hi со всеми размещенными элементами
![]()
б) максимум разности связей fi между размещенными и неразмещенными элементами
Выбранный для размещения элемент устанавливают в такую позицию среди оставшихся незаполненных, при которой будет иметь наименьшее значение некоторая целевая функция. Для многих задач размещения в качестве такой функции может быть выбрана суммарная длина связей с уже размещенными элементами.
Последовательные алгоритмы размещения требуют небольших затрат машинного времени, относят их к классу полиномиальных алгоритмов со сложностью О(п), приводящих к неоптимальным решениям. Улучшить решение можно путем применения итерационных алгоритмов компоновки, основанных на изменении позиций одиночных элементов или групп элементов. Итерационные алгоритмы также относятся к классу полиномиальных со сложностью порядка О(п2) — О (n4).
Задача трассировки заключается в определении конкретной геометрии печатного или проводного монтажа, реализующего соединения между элементами схемы. Исходными данными для трассировки являются список цепей, метрические параметры и топологические свойства типовой конструкции и ее элементов, а также результаты решения задачи размещения, по которым находят координаты выводов элементов.
При решении задачи трассировки строят множество трасс, соединяющих выводы элементов соответствующих цепей схемы. Разработка отдельной трассы представляет собой построение на фиксированных вершинах минимального покрывающего или связывающего дерева, а разработка множества трасс сводится к построению леса непересекающихся минимально покрывающих или связывающих деревьев. Известно, что на п вершинах можно построить пп-2 различных деревьев, поэтому точное решение задачи трассировки методом полного перебора практически нереализуемо.
В последовательных алгоритмах трассировки трассы цепей проводятся в определенном порядке одна за другой, при этом каждая проложенная трасса становится препятствием для всех последующих цепей. В последовательных алгоритмах производят локальную оптимизацию качества трассировки каждой отдельной трассы без учета влияния размещения данной трассы на возможность проведения последующих. Это приводит к тому, что некоторые участки платы могут оказаться заблокированными.
Большинство известных алгоритмов трассировки основывается на волновом алгоритме (алгоритм Ли). Основные принципы волнового алгоритма Ли заключаются в следующем. Плоскость трассировки разбивают на прямоугольные площадки — дискреты заданного размера. Размер дискретной площадки определяется допустимыми размерами проводников и расстояниями между ними. Задача проведения трасс сводится к получению последовательности дискретов, соединяющих элементы а и b, соответствующие началу и концу проводимой трассы.
Вводим целевую функцию F=F(f1,...,fr) как критерий качества пути. Начиная с элемента а дискретам, соседним с ранее просмотренным, присваивают определенное значение целевой функции Fij=m (i, j). Этот этап проводится итерационно до элемента b, которому присваивают некоторое значение веса m(ib, jb). Затем, начиная от элемента b, перемещаются к элементу а по пройденным дискретам таким образом, чтобы значения целевых функций дискретов монотонно убывали. В результате получается трасса, соединяющая элементы а и b.
Обычно работа алгоритма Ли реализуется следующим образом. На трассируемой плоскости из источника а моделируется распространение волны до тех пор, пока не будет достигнута точка b или пока на некотором шаге фронт волны не сможет включить ни одного незанятого дискрета. Эту часть алгоритма называют распространением волны. После этого проводят трассу, начиная от конечной точки b, по дискретам с последовательно уменьшающимися весами. На рис. 9.14 цифры в квадратах соответствуют весам дискретов, занятые дискреты заштрихованы, а построенная трасса показана штриховой линией.
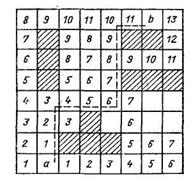
Рис. 9.14. Пример соединения элементов а и b с помощью волнового алгоритма
Существует несколько вариантов проведения пути, из которых конструктор (или ЭВМ) выбирает один, наиболее удовлетворяющий заданным требованиям. Имеется многообразие модификаций волновых алгоритмов, направленных на повышение быстродействия трассировки, уменьшение объема требуемой оперативной памяти ЭВМ и т. д. Волновые алгоритмы широко применяют в различных областях техники, в частности при разработке сетей связи и сетей ЭВМ.
9.14. Алгоритм распределения консультационных функций по модулям САК
Пусть задано множество консультационных функций, реализуемых в САК (i = 1, 2, ...,), задано множество функциональных модулей САК
(j = 1, 2, .,.,). Необходимо так распределить функции по модулям системы, чтобы достигнуть максимального значения эффективности, не выходя из области допустимых ограничений. Пусть Сij — затраты на реализацию i-й функции (консультационных операций) в j-м модуле, tij — время реализации функции в j-м модуле.
Вводим дополнительную переменную
![]()
Оптимизация распределения консультационных функций по модулям может производиться по одной из следующих целевых функций:
 (9.132)
(9.132)
![]() (9.133)
(9.133)
![]() (9.134)
(9.134)
Функция (9.132) соответствует минимизации затрат, функция (9.133) — минимизации общего времени реализации консультационных функций, а функций (9.134) — минимизации максимального времени, реализации консультационной функции в модуле. При этом могут учитываться следующие ограничения:
а) связи между функциями (обычно задаются графом G (J), где J — множество функций;
б) связи между модулями, в состав которых входят технические средства (элементы) системы (обычно задаются графом G (J), где J — множество модулей);
в) ограничение на общее время реализации консультационных функций
если минимизируются затраты, либо ограничение на общие затраты по реализации функций в САК

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
