
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Два многогранника называются двойственными, если элементы одного могут быть таким образом поставлены во взаимно однозначное соответствие с элементами другого, что при этом пары инцидентных элементов одного многогранника соответствуют парам инцидентных элементов другого, и при этом:
вершины первого многогранника соответствуют граням второго, ребра первого многогранника соответствуют ребрам второго, грани первого многогранника соответствуют вершинам второго. Нетрудно видеть, что куб и октаэдр в этом смысле двойственны друг другу, а тетраэдр двойствен самому себе.
2.5.6. Группа поворотов икосаэдра и додекаэдра
1. Среди всех пяти правильных многогранников нам осталось рассмотреть два: икосаэдр и додекаэдр (рис. 2.11, 2.12).
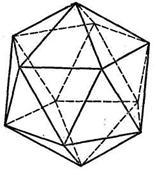

Рис. 2.11 Рис. 2.12
Эти многогранники двойственны между собой и группы их самосовмещений изоморфны.
Для того чтобы убедиться в этом, достаточно вписать икосаэдр в додекаэдр (рис. 2.13) или додекаэдр в икосаэдр (рис. 2.14).


Рис. 2.13 Рис. 2.14
Поэтому нам достаточно ознакомиться с группой самосовмещений икосаэдра. Чтобы определить число ее элементов, мы поступим так же, как и в случае тетраэдра и куба. А именно, мы сначала рассмотрим те самосовмещения икосаэдра, которые оставляют неподвижной одну какую-нибудь из его вершин. Таких самосовмещений имеется пять, а именно: пять поворотов вокруг оси, которая соединяет данную вершину с противоположной ей. Так как всех вершин 12, то число самосовмещений икосаэдра есть 5∙12=60. Все эти самосовмещения оказываются поворотами икосаэдра вокруг его осей симметрии. В самом деле, имеются следующие оси симметрии икосаэдра:
Шесть осей, которые соединяют противоположные вершины: вокруг каждой из них имеем четыре нетождественных поворота (на углы 2π/5, 4π/5, 6π/5, 8π/5), совмещающих икосаэдр с самим собой; всего, значит, получаем 4∙6 = 24 поворота;
10 осей, которые соединяют центры противоположных граней; вокруг каждой из этих осей имеем два нетождественных поворота (на угол 2π /5 и 4π /5), а всего 20 поворотов;
15 осей, которые соединяют середины противоположных ребер и дающих по одном нетождественному повороту (на 180°);
итак, имеем 24+20+15 нетождественных поворота и один тождественный поворот - всего 60 поворотов.
Как всегда, из этого рассуждения следует, что икосаэдр имеет 31 ось симметрии.
Ввиду достаточной сложности группы поворотов икосаэдра мы не будем здесь далее останавливаться на ее изучении. Заметим только, что эта группа изоморфна знакопеременной группе подстановок из пяти элементов.
2. Мы определяли группы поворотов многоугольников и многогранников как группы самосовмещений.
Рассмотрим как бы два экземпляра пространства, вложенных один в другой. Одно пространство представляем себе в виде бесконечно распространяющегося во все стороны твердого тела и назовем его твердым пространством. Другое пространство представляем себе в виде пустого пространства.
Твердое пространство помещаем в пустое, в котором оно может перемещаться. Наш многогранник представляем как часть твердого пространства, недвижимую в нем и способную перемещаться лишь вместе с ним. При такой точке зрения можно рассматривать повороты всего «твердого» пространства в «пустом» пространстве (вокруг тех или иных осей), которые совмещают данный многогранник с самим собой, т. е. делают самосовмещения его. Так как каждое самосовмещение рассмотренных нами многогранников оказывалось поворотом вокруг той или иной оси и каждый поворот многогранника вокруг оси можно представлять себе как порожденный поворотом всего пространства вокруг той же оси, то группа самосовмещений данного многогранника изоморфна группе поворотов пространства, совмещеющих этот многогранник с самим собой. Эту последнюю группу обычно и имеют в виду, когда говорят о группе поворотов данного правильного многогранника. Часто ее даже называют просто «группой правильного многогранника».
Группы правильных пирамид (т. е. конечные циклические группы), группы диэдров и только что рассмотренные группы правильных многогранников суть единственные конечные подгруппы группы всех перемещений пространства.
2.6. Ивариантные подгруппы
2.6.1. Сопряженные элементы и подгруппы
1. Трансформация одного элемента группы при помощи другого. Рассмотрим в группе G два каких-нибудь элемента а и b. Элемент
b-1аb
называется трансформацией элемента а при помощи элемента b.
Посмотрим, при каких условиях имеет место равенство
b-1аb=а. (2.23)
Если равенство (2.23) выполнено, то умножая ее части слева на b, получим
ab = ba. (2.24)
Итак, если выполнено (2.23), то выполнено и (2.24), т. е. элементы а и b переместительны. Обратно, если выполнено (2.24), то умножая обе ее части на b-1 слева, получим
b-1аb = b-1ba =a,
т. е. имеет место и равенство (2.23). Итак, мы видим, что для того, чтобы при данных а и b имело место равенство (2.23), т. е. чтобы трансформация элемента а при помощи элемента b равнялось самому элементу а, необходимо и достаточно, чтобы элементы а и b были переместительными (удовлетворяли равенства (2.24)).
В частности, в коммутативных группах равенство (2.23) имеет место для любых элементов а и b.
В качестве иллюстрации понятия трансформации рассмотрим группу G всех подстановок из п элементов; пусть
![]()
Тогда очевидно,
 (2.25)
(2.25)
Формула (2.25) может быть записана в виде следующего правила:
пусть
![]()
чтобы получить трансформацию подстановки а при помощи подстановки b, нужно в обеих строках обычной записи подстановки а сделать подстановку b.
Объясним это правило еще частыми примерами. Пусть, например, п = 3 и
![]()
Получаем
![]()
Намного проще понять только что выведенное правило, пользуясь термином отображения или функция.
Подстановка а означает функцию y=f(x), x = 1, 2, ..., п, у=1, 2, 3,...,п, где двум различным значениям х всегда соответствуют два различных значения у, так что f есть взаимно однозначное отображение множества {1, 2, ... , п} на себя.
Подстановка b есть функция φ=f(х) той же природы, что и f{x). Подстановка b-lab есть функция y=F(x), определенная формулой
![]() (2.26)
(2.26)
Она получается, если элементу φ(х) поставить в соответствие элемент φ [f (х)]; это непосредственно видно, если в формуле (2.26) поставить φ(х) вместо х и заметить, что
φ-1 [φ(х)]=х.
Так как х пробегают все числа 1, 2, 3, ..., п, то и φ(х) пробегает все те же числа, только в другом порядке, и формулой
 (2.27)
(2.27)
функция F(x), т. е. подстановка b-1ab, вполне определена. Формула (2.27) представляет собой только другая запись формулы (2.25). Наконец, если обозначить f(x) через у, полученный результат можно сформулировать еще и так:
подстановка F заключается в том, что элемент φ(х) заменяется элементом φ(у).
Так как всякая конечная группа изоморфна некоторой группе подстановок, то формула (2.25) выясняет содержание понятия «трансформация», по крайней мере для всех конечных групп.
2. Пример группы тетраэдра. Рассмотрим в виде дальнейшего примера группу поворотов тетраэдра ABCD (рис. 2.15).
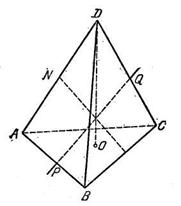
Рис. 2.15
Пусть а есть поворот тетраэдра вокруг оси MN (которая соединяет середины ребер ВС и AD) на угол π, пусть b есть поворот вокруг оси DO, переводящей А в С, В в А, С в В; тогда b-1ab есть поворот на угол π вокруг оси PQ, соединяющей середины ребер АВ и CD. В этом можно убедиться как непосредственно, так и замечая, что поворот а производит подстановку вершин
![]() ,
,
тогда как b производит подстановку
![]() .
.
Производя в каждой строке выражения ![]()
подстановку ![]() , получим
, получим ![]() , т. е.
, т. е.
 , соответствующую повороту вокруг оси PQ на угол π.
, соответствующую повороту вокруг оси PQ на угол π.
Таким же точно образом убедимся, что
а-1bа
есть поворот, переводящий В в С, С в D, D в В вокруг оси, соединяющей вершину А с центром грани BCD. Этому повороту соответстует подстановка
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
