
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
а) Поворот Rαl вокруг оси l на угол α - это перемещение, состоящее в повороте каждой точки пространства в плоскости, которая проходит через эту точку и перпендикулярной к данной прямой l (оси поворота), на данный угол α (угол поворота) вокруг точки пересечения этой плоскости с осью.
Ось и угол поворота задают поворот неоднозначно. Действительно, один и тот же результат можно получить, выполняя поворот вокруг данной оси на угол α в одном направлении и на угол 2π-α в другом направлении.
Впрочем, такая же неоднозначность существует и для поворотов на плоскости. Чтобы избежать этой неоднозначности, на плоскости вводят понятие положительного направления поворота - это поворот против часовой стрелки. В случае поворотов в просторные поступают так: выбирают на оси поворота определенное направление и считают, что поворот является положительным относительно данного направления на оси, если любая точка поворачивается в своей плоскости против часовой стрелки для зрителя, который стоит вдоль оси так, что направление от его ног к его главе и есть направление, которое было выбрано на оси.
В случае, когда угол поворота равен π, поворот называют опрокидыванием относительно данной оси (другое название перемещения Rπj — осевая симметрия).
В этом случае нет потребности указывать направление поворота. Опрокидывание Rπj обладает следующим свойством: Rπj![]() Rπj = E, где Е — тождественное перемещение.
Rπj = E, где Е — тождественное перемещение.
b) Винтовым перемещением Sal,α называется композиция поворота Rαj вокруг оси l и параллельного переноса Та, при условии, что вектор а параллелен оси поворота.
Порядок, в котором выполняются указанные перемещения, безразличен (что не имело бы места, если бы вектор а не был параллелен оси l).
Частными случаями винтового перемещения являются поворот и параллельный перенос.
Если задано некоторое винтовое перемещение, то тем самым задано и направление на оси поворота — это направление вектора а. В соответствии с этим винтовое перемещение называется положительным (правым) или отрицательным (левым), в зависимости от того, имеет ли данный поворот положительное или отрицательное направление оси относительно направления а.
c) Симметрия Sπ относительно плоскости π - это перемещение, которое оставляет все точки данной плоскости π на месте, а любую другую точку А пространства переводит в точку А' такую, что прямая (АА') перпендикулярна к плоскости π и |АО|=|ОА'|, где О - точка пересечения прямой (АА') и плоскости π.
d) Скользящая симметрия — это композиция Та° Sπ = Sπ° Та, где вектор а параллелен плоскости π (благодаря чему порядок операций в композиции безразличен). e) Поворотная симметрия — это композиция R![]() ° Sπ = Sπ ° R
° Sπ = Sπ ° R![]() , где ось l перпендикулярна к плоскости π (что снова делает безразличным порядок операций в композиции).
, где ось l перпендикулярна к плоскости π (что снова делает безразличным порядок операций в композиции).
Оказывается, что этими примерами исчерпываются все перемещения пространства; точнее, справедлива следующая теорема (которую мы приведем без доказательства).
Теорема 1. Любое перемещение пространства есть либо параллельный перенос, либо поворот вокруг оси, либо винтовое перемещение, либо симметрия относительно плоскости, либо скользящая симметрия, либо поворотная симметрия.
Чтобы рассматривать дальнейший матерал, нам понадобится некоторые сведения о композиции пространственных перемещений.
Теорема 2. Композиция двух опрокидываний относительно различных осей представляет собой:
a) если оси параллельны — параллельный перенос, перпендикулярный к обеим осям, равный удвоенному переносу, переводящему первую ось во вторую;
b) если оси пересекаются — поворот вокруг общего перпендикуляра к обеим осям, проходящего через точку пересечение, на угол, равный удвоенному углу поворота, переводящего первую ось во вторую;
с) если оси не лежат в одной плоскости — винтовое перемещение, имеющее своей осью общий перпендикуляр к обеим осям и равное удвоенному винтовому перемещению, переводящему первую ось во вторую (существование такого перемещения будет следовать из доказательства теоремы). (Термин удвоенное винтовое перемещение означает следующее. Если Sal,α некоторое винтовое перемещение, то удвоенное по отношению к Sal,α винтовое перемещение – это S 2al,2α ).
Доказательство. а) Пусть l1 и l2 — оси данных опрокидываний, A - некоторая точка пространства, а1 — ее прямоугольная проекция на ось l1, А'- образ точки А при опрокидывании относительно оси l1 ,а2 — прямоугольная проекция точки А' на ось l2 и А" — образ точки А' при опрокидывании относительно оси l2 (рис. 2.18).
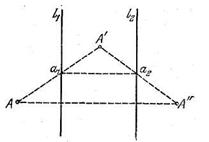
Рис. 2.18
Плоскость, перпендикулярная осям l1 и l2 и проходящая через точку А, проходит через прямую (АА') перпендикулярную к l1, и через прямую (АА"), перпендикулярную к l2. Поэтому прямая (а1а2) является общим перпендикуляром к прямым l1 и l2, а точка А" получается из точки А параллельным переносом, равным удвоенному переносу, который переводит прямую l1 в прямую l2.
b) Пусть О - точка пересечения осей l1 и l2, π - содержащая их плоскость, (ОС) — перпендикуляр к этой плоскости, которая проходит через точку O (рис. 2.19).
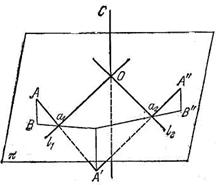
Рис. 2.19
Пусть, далее А — произвольная точка пространства, А' — ее образ при опрокидывании относительно оси l1 (причем прямая (АА') пересекает ось l1 в точке а1) и А" - образ точки А' при опрокидывании относительно оси l2 (причем прямая (А'А") пересекает ось l2 в точке а2).
Опрокидывание относительно осей l1 и l2 переводят плоскость π в себя. Поэтому если мы спроектируем точки А, А', А" на эту плоскость в точки В, В' и В", то точки В и В" будут получаться из В' с помощью опрокидываний относительно осей l1 и l2 соответственно. Значит, точка А"- получается из точки А поворотом вокруг оси (ОС) на угол, равный удвоенному углу между l1 и l2. Так как отрезки [ВА] и [В"А"] конгруэнтны, параллельны (ОС) и направлены в одну и ту же сторону, то этот же поворот вокруг оси (ОС) совмести точку А с точкой А".
с) Пусть теперь оси l1 и l2 не лежат в одной плоскости. Обозначим через (O1O2) общий перпендикуляр к l1 и l2, причем точка О1 лежит на оси l1, а точка О2 лежит на оси l2 (рис. 2.20).
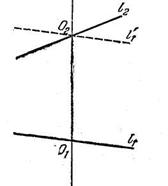
Рис. 2.20
Проведем через точку О1 прямую l′1, параллельную l1. Рассмотрим композицию следующих четырех опрокидываний:
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
Так как ![]()
![]()
![]() — тождественное преобразование, то эта композиция совпадает с искомой композицией
— тождественное преобразование, то эта композиция совпадает с искомой композицией ![]()
![]()
![]() . С другой стороны,
. С другой стороны, ![]()
![]()
![]() есть параллельный перенос, равный удвоенному переносу, переводящему ось l1 в ось l′1; композиция же
есть параллельный перенос, равный удвоенному переносу, переводящему ось l1 в ось l′1; композиция же ![]()
![]()
![]() , есть поворот вокруг прямой (О1О2) на угол, равный удвоенному углу между осями l′1 и l2. Следовательно, исходная композиция
, есть поворот вокруг прямой (О1О2) на угол, равный удвоенному углу между осями l′1 и l2. Следовательно, исходная композиция ![]()
![]()
![]() представляет собой винтовое перемещение, равное удвоенному винтовому перемещению, переводщему l1 в l2. Теорема доказана.
представляет собой винтовое перемещение, равное удвоенному винтовому перемещению, переводщему l1 в l2. Теорема доказана.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
