
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
v1∙ v2 = v3. (2.43)
Пусть а1 есть какой-нибудь элемент класса v1, а2 — какой-нибудь элемент класса v2, a3=a1∙a2. Мы знаем, что тогда а3 принадлежит v3. Положим
f(a1) = b1, f(a2)=b2, f(a3) = b3.
Так как f гомоморфно, то
b1∙ b2 = b3. (2.44)
Но так как v1, v2, v3 суть соответственно полные прообразы элементов b1, b2, b3, то
ψ(v1) = bl, ψ(v2)=b2, ψ(v3)=b3,
так что равенство (2.44) может быть переписано в виде
ψ(v1)∙ ψ(v2) = ψ(v3),
чем и доказан гомоморфный характер отображения ψ. Как взаимно однозначное гомоморфное отображение группы V на группу В, отображение ψ есть изоморфное отображение V на В. Итогом всего предыдущего является следующая теорема.
Нетера о гомоморфных отображениях.
Всякое гомоморфное отображение одной группы А на другую группу В имеет своим ядром некоторую инвариантную подгруппу группы А. Обратно, всякая инвариантная подгруппа U группы А есть ядро некоторого гомоморфного отображения φ группы А на факторгруппу V группы А по подгруппе U. Отображение φ получается, если каждому элементу группы А поставить в соответствие его класс относительно инвариантной подгруппы U. Если f есть произвольное гомоморфное отображение группы А на группу В, то полные прообразы элементов группы В при этом отображении суть классы группы А по ядру U отображения f и группа В изоморфна факторгруппе группы А по подгруппе U.
Итак, инвариантные подгруппы данной группы А совпадают с ядрами всевозможных гомоморфных отображений этой группы, а все группы, являющиеся гомоморфными образами группы А, совпадают с группами, изоморфными факторгруппам группы А по всевозможным ее инвариантным подгруппам.
Следствие. Для того чтобы гомоморфное отображение группы А на группу В было изоморфным, необходимо и достаточно, чтобы ядро этого отображения состояло из одного нейтрального элемента группы А.
2.9. Группа перемещений плоскости и пространства и их подгрупп
2.9.1. Группа перемещений плоскости.
Напомним, что перемещением плоскости называется такое преобразование, которое сохраняет расстояния. Другими словами, преобразование F называется перемещением, если для любых двух различных точек А и В плоскости справедливо соотношение |АВ| = |А'В'|, где А'=F(А) и В'=F(B). Примеры перемещений хорошо известны читателю со школьного курса геометрии. Это параллельный перенос Ta, поворот RαО вокруг точки О на угол α, симметрия Sl относительно оси l, а также скользящая симметрия Sal(a||b), которая по определению есть композиция Sal=Ta![]() Sl=Sl
Sl=Sl![]() Ta. Оказывается, что других перемещений плоскости нет.
Ta. Оказывается, что других перемещений плоскости нет.
Теорема 1 (Шаль). Любое перемещение плоскости есть либо параллельный перенос, либо поворот, либо скользящая симметрия (в частности, симметрия, если а = 0).
Доказательство. Доказательство этого утверждения основано на так называемой «аксиоме подвижности плоскости», согласно которой существует ровно два перемещения, которые переводят пару (различных) точек А, В плоскости в любую другую пару точек А1, B1, для которых |А1В1|=|АВ|. Пусть теперь F — некоторое перемещение, А0 — некоторая точка на плоскости, A1=F (А0), A1=F(A1). Рассмотрим три случая:
1) А2 =А0;
2) А2≠ А0, но точка А2 лежит на прямой (A0A1);
3) точка А2 не лежит на прямой (A0A1).
Если в каждом из этих трех случаев мы найдем по два различных перемещения из тех, которые бели указаны в формулировке теоремы, то в силу упомянутой выше аксиомы это и является доказательсьвом теоремы.
В случае 1) эти перемещения суть поворот вокруг середины отрезка [A0A1] на угол π и симметрия относительно прямой, перпендикулярной к [A0A1] и проходящей через ее середину.
В случае 2) требуемыми перемещениями являются параллельный перенос на вектор а = и симметрия относительно прямой, перпендикулярной к (А0А2) и проходящей через точку А1.
В случае же 3) это поворот вокруг точки О – точки пересечение перпендикуляров, восстановленных из середины отрезков [A0A1] и [A1A2] (рис. 2.16) и скользящая симметрия, ось которой параллельна оси (А0А2) и проходит через середину [A1A′1], где A′1 — прямоугольная проекция точки А1 на (А0А2), а вектор а= (рис. 2.17). Теорема доказана.
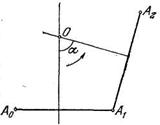
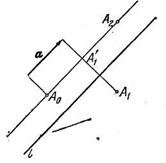
Рис. 2.16 Рис. 2.17
Параллельный перенос и поворот называются перемещениями первого рода, а симметрия и скользящая симметрия — перемещениями второго рода.
Имеет место следующее утверждение: композиций двух перемещений первого рода есть перемещение первого рода, композиция перемещений первого и второго рода есть перемещение второго рода, а композиция перемещений второго рода есть перемещение первого рода.
Приведем краткое доказательство этого утверждения.
Доказательство основывается на следующем простом факте: композиция двух симметрий ![]()
![]() есть параллельный перенос Ta в случае, когда l1 || l2 и поворот RαО, когда эти прямые пересекаются в точке О. Кроме того, вектор а в перемещении Ta перпендикулярен к l1 и l2, направлен от l1 к l2 и по величине равен удвоенному расстоянию между этими прямыми. Угол α в повороте RαО есть удвоенный угол между прямыми l1 и l2,
есть параллельный перенос Ta в случае, когда l1 || l2 и поворот RαО, когда эти прямые пересекаются в точке О. Кроме того, вектор а в перемещении Ta перпендикулярен к l1 и l2, направлен от l1 к l2 и по величине равен удвоенному расстоянию между этими прямыми. Угол α в повороте RαО есть удвоенный угол между прямыми l1 и l2,
Из этого факта вытекает, что любой параллельный перенос и любой поворот можно представить в виде композиции двух симметрий. Например, чтобы получить такое представление для данного параллельного переноса Ta, выбираем произвольную прямую l1 перпендикулярную к а и параллельно переносим ее с помощью Ta/2; тогда Ta=![]()
![]() , где l2= Ta/2 (l1). Аналогично и для поворота. Значит, любое перемещение плоскости есть композиция некоторого числа симметрий: поворот и параллельный перенос - композиция двух симметрий, самая симметрия — композиция одной симметрии, скользящая симметрия - композиция трех симметрий. Заметим, что перемещение первого рода суть композиции четного числа симметрий, а перемещение второго рода — композиции нечетного числа симметрий. Верно и обратное: если перемещение первого (второго) рода каким бы то ни было способом представлено в виде композиции некоторого числа симметрий, то это число симметрий четное (нечетное). (Указание. Оно эквивалентно следующему утверждению: не существует представления тождественного преобразования в виде нечетного числа симметрий.)
, где l2= Ta/2 (l1). Аналогично и для поворота. Значит, любое перемещение плоскости есть композиция некоторого числа симметрий: поворот и параллельный перенос - композиция двух симметрий, самая симметрия — композиция одной симметрии, скользящая симметрия - композиция трех симметрий. Заметим, что перемещение первого рода суть композиции четного числа симметрий, а перемещение второго рода — композиции нечетного числа симметрий. Верно и обратное: если перемещение первого (второго) рода каким бы то ни было способом представлено в виде композиции некоторого числа симметрий, то это число симметрий четное (нечетное). (Указание. Оно эквивалентно следующему утверждению: не существует представления тождественного преобразования в виде нечетного числа симметрий.)
В силу сказанного высше перемещения первого и второго рода можно определить как такие перемещения, которые разлагаются в композиции соответственно четного и нечетного числа симметрий. Следовательно, композиция двух перемещений первого рода есть перемещение первого рода, композиция перемещений первого и второго рода - перемещение второго рода, а композиция двух перемещений второго рода - перемещение первого рода, что и требовалось.
Все перемещения плоскости образуют группу, операцией в которой является композиция перемещений. Действительно, если два преобразования сохраняют расстояние между точками, то сохраняет его и композиция этих преобразований, т. е. композиция перемещений есть перемещение. Аксиома ассоциативности выполнена, поскольку она выполнена для всех вообще преобразований плоскости. Далее, тождественное преобразование есть перемещения. И наконец, преобразование, обратное к перемещению, также сохраняет расстояние, т. е. является перемещением.
Группа всех перемещений плоскости обозначается Е(2). Она содержит бесконечное число подгрупп. Прежде всего, в силу сказанного выше подгруппу образуют все перемещения первого рода. Мы будем обозначать эту подгруппу через Е0(2). Если F — перемещение первого рода, a G — произвольное перемещение, то G![]() F
F![]() G-1 есть непременно перемещение первого рода, поэтому подгруппа перемещений первого рода Е0(2) инвариантна в группе всех перемещений Е(2). Легко видеть, что существуют ровно два класса по этой подгруппе: она сама и класс перемещений второго рода. Следовательно, подгруппа Е0(2) имеет индекс 2 в группе всех перемещений Е(2) и факторгруппа Е(2) по Е0(2) является циклической группой из двух элементов.
G-1 есть непременно перемещение первого рода, поэтому подгруппа перемещений первого рода Е0(2) инвариантна в группе всех перемещений Е(2). Легко видеть, что существуют ровно два класса по этой подгруппе: она сама и класс перемещений второго рода. Следовательно, подгруппа Е0(2) имеет индекс 2 в группе всех перемещений Е(2) и факторгруппа Е(2) по Е0(2) является циклической группой из двух элементов.
Займемся теперь группой Е0(2). Среди подгрупп этой группы отметим прежде всего бесконечное число групп поворотов: совокупность всех поворотов плоскости вокруг какой-нибудь определенной ее точки образует группу, и каждая из этих групп, как нетрудно видеть, изоморфна группе SO (2) (см. п.2.5.2); следовательно, все эти группы коммутативны.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
