
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2. Двумя существенно различными методами мы докажем сходимость полученного формального решения.
Положим ![]() и рассмотрим уравнения
и рассмотрим уравнения
![]()
Нетрудно видеть, что ![]() (символ Кронекера); вообще для произвольного β коэффициент
(символ Кронекера); вообще для произвольного β коэффициент![]() есть линейная комбинация тех коэффициентов рядов
есть линейная комбинация тех коэффициентов рядов ![]() которые стоят при одночленах степени, строго меньшей, чем β. В этих линейных комбинациях участвуют также целые числа (различные биномиальные коэффициенты), не зависящие от
которые стоят при одночленах степени, строго меньшей, чем β. В этих линейных комбинациях участвуют также целые числа (различные биномиальные коэффициенты), не зависящие от ![]() Таким образом, по индукции
Таким образом, по индукции
![]()
где
![]() — многочлен с целыми положительными коэффициентами, которые не зависят ни от
— многочлен с целыми положительными коэффициентами, которые не зависят ни от ![]() ни от
ни от ![]()
в качестве переменных в![]() участвуют только аі,α с
участвуют только аі,α с 
Единственность формального решения установлена; остается доказать его (абсолютную) сходимость.
Первый способ доказательства основан на том, что, как мы уже говорили, поле k можно считать неархимедовым. Мы можем также предполагать, что ![]() для всех i и β. Поскольку
для всех i и β. Поскольку  ясно, что
ясно, что  для всех i и β. Следовательно,
для всех i и β. Следовательно,
ряды ![]() сходятся в полицилиндре
сходятся в полицилиндре ![]()
Второй способ доказательства, так называемый метод мажорант Коши, пригоден также и для полей R и С. Допустим, что нам удалось найти такие положительные ряды ![]() что
что
(1) ряды
![]()
сходятся, где ![]() — формальное решение задачи обращения для
— формальное решение задачи обращения для
![]()
(2)  для всех і и α.
для всех і и α.
Тогда легко показать, что
(3) для всех і и β.
для всех і и β.
Действительно, поскольку многочлен ріβ имеет целые положительные коэффициенты,

Очевидно, из свойств (2) и (3) в совокупности следует сходимость всех рядов ![]() Нам остается поэтому подыскать требуемые формальные вещественные ряды
Нам остается поэтому подыскать требуемые формальные вещественные ряды ![]()
Пусть сначала п=1. В силу сходимости ряда φ1 можно подобрать такое достаточно большое натуральное т, что ряд

удовлетворяет свойству (1) (лемма Абеля). Вычислим в явном виде соответствующий обратный ряд ![]() Для этого нам надо решить уравнение
Для этого нам надо решить уравнение
Решение этого уравнения дается формулой
![]()
из которой легко усмотреть, что![]() представляется степенным рядом, сходящимся в окрестности нуля.
представляется степенным рядом, сходящимся в окрестности нуля.
Перейдем теперь к обшему случаю; пусть п - произвольное натуральное число. Заменяя, если нужно, ряды ![]() на
на  (где μ — специально подобранный с помощью леммы Абеля элемент поля k), мы можем считать, что для всех і и α. Рассмотрим положительные ряды
(где μ — специально подобранный с помощью леммы Абеля элемент поля k), мы можем считать, что для всех і и α. Рассмотрим положительные ряды
![]()
и докажим, что они обладают требуемыми свойствами. В силу нашего соглашения свойство (1) выполняется очевидным образом. Соответствующие обратные ряды ![]() имеют вид
имеют вид

В самом деле,
Поскольку ряды ![]() сходятся з некоторой окрестности нуля, теорема доказана.
сходятся з некоторой окрестности нуля, теорема доказана.
„Опасные повороты". 1. Пусть k — неархимедово поле. Функция φ, равная единице на элементах кольца ![]() и нулю на дополнении
и нулю на дополнении ![]() всюду аналитична. Это вытекает из того факта, что множество
всюду аналитична. Это вытекает из того факта, что множество ![]() одновременно открыто и замкнуто в k.
одновременно открыто и замкнуто в k.
2. Если поле k имеет характеристику р>0, то для любой аналитической функции φ, определенной в области![]() имеем
имеем

В частности, радиус сходимости производной формального ряда может быть строго больше радиуса сходимости самого этого ряда.
3. Если функция φ аналитична в области  причем
причем ![]() где
где ![]() то ряд Тейлора функции φ в точке х вовсе не обязан сходиться во всем полицилиндре
то ряд Тейлора функции φ в точке х вовсе не обязан сходиться во всем полицилиндре ![]() Последнее имеет место, вообще говоря, лишь для k = С.
Последнее имеет место, вообще говоря, лишь для k = С.
3.4. Типы математических моделей
3.4.1. Структурные и функциональные модели.
Обычно в математической модели отражается структура (устройство) моделируемого объекта, существенные для целей исследования свойства и взаимосвязи компонентов этого объекта; такая модель называется структурной. Если же модель отражает только то, как объект функционирует — например, как он реагирует на внешние воздействия,— то она называется функциональной или, образно, черным ящиком. Возможны и модели комбинированного типа.
Рассмотрим пример. Пусть на платформе массы т1 упруго закреплен груз массы ![]() (т. е. т2 значительно меньше т1 рис. 1).
(т. е. т2 значительно меньше т1 рис. 1).
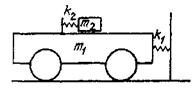
Рис. 1
Платформа, столкнувшись со стенкой, под действием буфера откатывается назад. Нас интересует зависимость амплитуды А колебаний груза после взаимодействия платформы со стенкой от скорости v накатывания платформы. Жесткости k1 буфера и k2 упругого закрепления считаем заданными; силами трения и учетом вращательного движения колес пренебрегаем.
Будем отсчитывать время t от момента столкновения и обозначим буквой T время взаимодействия платформы со стенкой, а символами ![]() и
и ![]() соответственно координаты платформы и груза относительно платформы, отсчитываемые от их положений при t = 0. С учетом сделанных предположений (в частности, условия
соответственно координаты платформы и груза относительно платформы, отсчитываемые от их положений при t = 0. С учетом сделанных предположений (в частности, условия  получаем систему дифференциальных уравнений и начальные условия
получаем систему дифференциальных уравнений и начальные условия
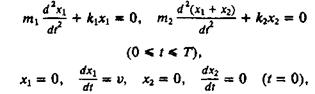 (1)
(1)
которые и составляют математическую модель рассматриваемой задачи. Из уравнения и начальных условий для x1 находим

(взаимодействие со стенкой заканчивается при первом значении t > 0, для которого х1 = 0). (Символы![]() обозначают равенство по определению, при этом двоеточие указывает на определяемую величину). Подставляя х1 в уравнение для х2, получаем (проверьте!)
обозначают равенство по определению, при этом двоеточие указывает на определяемую величину). Подставляя х1 в уравнение для х2, получаем (проверьте!)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
