

Отсюда при t = Т имеем


Начиная с момента t = Т груз совершает гармонические колебания с амплитудой А, определяемой этими начальными условиями. Из сохранения полной (т. е. суммы потенциальной и кинетической) энергии колебательной системы получаем после простых преобразований

откуда окончательно
 (2)
(2)
Таким образом, с помощью структурной модели мы получили явную формулу для коэффициента пропорциональности между скоростью платформы и амплитудой колебаний груза, возникающих после взаимодействия платформы со стенкой. Для каждой конкретной системы подобного типа мы можем, зная значения параметров  подсчитать значения этого коэффициента. Так, для
подсчитать значения этого коэффициента. Так, для
![]() (3)
(3)
получаем![]() с, откуда окончательно
с, откуда окончательно
т. е. ![]()
 (4)
(4)
Последнюю формулу можно рассматривать как функциональную модель рассматриваемой системы при значениях (3) параметров. Эту формулу для конкретных значений параметров можно было бы получить и непосредственно: в самом деле: пропорциональность величин v и А вытекает из линейности задачи или из анализа размерностей, а значение коэффициента пропорциональности h можно найти, проведя физический эксперимент для какого-либо одного значения v. Однако явное выражение (2) коэффициента h через параметры системы может оказаться полезным при ее проектировании. Отметим, что описанный только что (второй) способ вывода формулы (4) является примером идентификации математической модели. Эта процедура возникает, если после выбора схемы модели требуется определить ее параметры, уточнить структуру и т. п.
3.4.2. Дискретные и непрерывные модели
Как известно, величины могут быть двух типов — дискретные, т. е. принимающие «оторванные» друг от друга значения, допускающие естественную нумерацию, и непрерывные, принимающие все значения из некоторого интервала. Возможен также смешанный случай, например, когда величина на каком-то интервале своих значений ведет себя, как дискретная, а на другом — как непрерывная. (Эти определения не являются исчерпывающими, но для нас они достаточны.)
Подобным образом, модели — как содержательные, так и математические — могут быть либо дискретными, либо непрерывными, либо смешанными. Между этими типами нет принципиального барьера и при уточнении или видоизменении модели дискретная картина может стать непрерывной и обратно; то же может произойти в процессе решения математической задачи. Таким образом, во многих задачах при составлении математической модели, а также при выборе метода ее исследования надо учитывать возможность применения как «дискретного», так и «непрерывного» аппаратов (например, для дискретных моделей характерно применение сумм, а для непрерывных — производных и интегралов) независимо от характера исходной картины.
Пусть, например, изучается прогиб балки от груза, расположенного на интервале сравнительно малой длины. Хотя это распределение непрерывно, мы можем без существенной ошибки, переходя к модели, значительно упростить картину, заменив распределенный груз сосредоточенным.
Рассмотрим этот переход более подробно. Будем для простоты считать балку прямолинейной и направим ось х вдоль нее. Тогда, если груз распределен с плотностью q(x) на малом интервале (l), расположенном вблизи точки x = а, то после замены мы получаем груз
сосредоточенный в этой точке. Как известно, такой сосредоточенный груз можно рассматривать как распределенный с плотностью

где δ — дельта-функция Дирака (см. Добавление, п. 2). Такой подход как бы перекидывает мост между дискретными и непрерывными моделями и, в частности, дает возможность в случае сосредоточенной нагрузки пользоваться формулами, выведенными для нагрузки распределенной.
Описанный переход особенно целесообразен, если конкретный вид функции q(х) нам неизвестен, но суммарное значение Q мы знаем. Аналогичный переход к дискретной модели нагрузки можно совершить, если имеется несколько грузов, каждый из которых распределен на малом интервале.
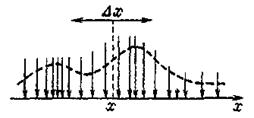
Но пусть таких грузов, замененных на сосредоточенные, много (см. рис. 1, где показан участок балки).
Pис. 1
Тогда может оказаться удобнее перейти к непрерывной модели нагрузки, распределенной с плотностью, показанной на рис. 2 штриховой линией. Эта плотность получается с помощью осреднения исходного распределения следующим образом. Для каждого значения х мы подсчитываем нагрузку приходящуюся на интервал некоторой длины ∆х с центром в точке x, а затем полагаем плотность q(x) равной
приходящуюся на интервал некоторой длины ∆х с центром в точке x, а затем полагаем плотность q(x) равной
q (х) (= q (х; ∆х))=![]() Q (х; ∆х).
Q (х; ∆х).
(Конечно, практически такой подсчет проводится лишь в каком-то числе точек.) Особенно простая картина получается, если грузы расположены периодически со сравнительно малым периодом: тогда осредненная плотность постоянна.
Эпюра плотности нагрузки зависит от выбора интервала осреднения ∆х. Каким надо взять этот интервал? Нетрудно понять (продумайте это!), что он должен быть велик по сравнению с характерным расстоянием между грузами, но мал по сравнению с общей длиной балки. Например, можно взять среднее геометрическое этих двух величин. (Подумайте, почему не среднее арифметическое.)
Аналогичная процедура происходит, когда мы от среды, состоящей из отдельных частиц, переходим с помощью осреднения к сплошной среде, параметры которой (плотность, температура и т. п.) распределены по пространству; от поезда с дискретными вагонами переходим к его непрерывной модели; от воздействия на систему, имеющего характер частых подталкиваний, переходим к непрерывно действующей силе и т. д.
Осреднение применяется не только для перехода от дискретной модели к непрерывной, но также и для упрощения быстро колеблющихся зависимостей в непрерывных моделях.
Переход от дискретной модели к непрерывной, равно как и обратный переход, может существенно упростить исследование, но порой может внести и неадекватность, за чем необходимо следить. Пусть, например, изучаются продольные свободные упругие колебания (с линейным законом упругости) прямолинейного однородного стержня. Обозначим и=и(х, t) смещение в момент t сечения с координатой х, отсчитываемой вдоль стержня. Тогда (см. Добавление, п. 16) и удовлетворяет уравнению с частными производными
 (1)
(1)
Здесь
![]()
а смысл букв указан в Добавлении, п. 16.
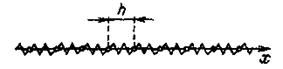
Заменим стержень на дискретную модель (рис. 2), состоящую из последовательности с некоторым шагом h материальных точек массы
т, соединенных пружинами нулевой массы и жесткости k.
Pис. 2
В качестве т естественно взять массу соответствующей «порции» стержня, т. е. ![]() где S — площадь поперечного сечения стержня. Жесткость k выберем такой, чтобы в обеих моделях данному относительному удлинению ε отвечала одинаковая упругая сила. Это приводит к равенству
где S — площадь поперечного сечения стержня. Жесткость k выберем такой, чтобы в обеих моделях данному относительному удлинению ε отвечала одинаковая упругая сила. Это приводит к равенству (продумайте его!), откуда
(продумайте его!), откуда ![]()
Обозначим ![]() смещение i-й точки и применим к ней второй закон Ньютона. Мы получим уравнение
смещение i-й точки и применим к ней второй закон Ньютона. Мы получим уравнение

которое после простых преобразований приобретает вид
 (2)
(2)
(Тот же результат получится, если производную в правой части уравнения (1) заменить на симметричную разделенную разность второго порядка, как это делается при численном решении уравнений с частными производными.) Равенство (2) имеет место для каждого из использованных значений t, т. е. мы получили систему обыкновенных дифференциальных уравнений.
Покажем, как можно обратно от дискретной модели (2) перейти к непрерывной модели (1). Для этого надо считать х непрерывной переменной и, обозначив х, исходную (лагранжеву) координату i-й точки, воспользоваться формулой Тейлора:

![]()
![]()
Подставив эти выражения в (2), мы после сокращения на h2 и перехода к пределу при![]() приходим к уравнению (1).
приходим к уравнению (1).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
