
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В общем случае очевидно, что между некоторыми вершинами путь может не существовать. Относительная нумерация таких вершин может быть произвольной. Случаи, когда ряд вершин образуют на графе цикл, алгоритмами планирования на базе использования ориентированных графов исходной модели принципиально не охватываются.
Таким образом, на базе исходной модели М, описывающей объект в целом, путем объединения элементарных моделей в различных комбинациях можно сформировать множество моделей ![]() соответствующих отдельным агрегатам и системам этого объекта и различным аспектам его функционирования. Выше такие модели были названы агрегированными (блочными).
соответствующих отдельным агрегатам и системам этого объекта и различным аспектам его функционирования. Выше такие модели были названы агрегированными (блочными).
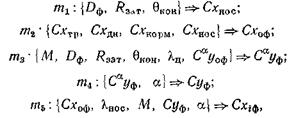
В качестве примера рассмотрим некоторую совокупность элементарных математических моделей, описывающих геометрию и аэродинамику корпуса ЛА :
где ![]() — диаметр корпуса;
— диаметр корпуса; ![]() — радиус затупления носка
— радиус затупления носка
корпуса; ![]() — полуугол раствора носового конуса; М — число
— полуугол раствора носового конуса; М — число
Маха набегающего потока; ![]() — коэффициент сопротивления
— коэффициент сопротивления
носовой части корпуса (затупленный конус); ![]() — коэффи-
— коэффи-
циент лобового сопротивления корпуса при  —
—
коэффициент сопротивления трения корпуса;![]() — коэффициент
— коэффициент
донного сопротивления корпуса; ![]() — коэффициент сопро-
— коэффициент сопро-
тивления кормовой части корпуса.
Здесь т1 определяется следующими скалярными моделями:

где ![]() — относительный радиус затупления носка корпуса;
— относительный радиус затупления носка корпуса; ![]() — удлинение носовой части корпуса без затупления;
— удлинение носовой части корпуса без затупления;![]() — коэф-
— коэф-
фициент сопротивления носовой части корпуса (заостренный конус); ![]() — коэффициент сопротивления затупленной носовой части;
— коэффициент сопротивления затупленной носовой части; ![]() —таблица значений функции
—таблица значений функции ![]()
![]() — таблица значений функции
— таблица значений функции ![]() =
=![]() .
.
На рис. 1 показан граф, описывающий структуру данной модели, а на рис. 2, а—г — примеры принципиально возможных агрегированных моделей, которые могут быть составлены на базе исходной модели.
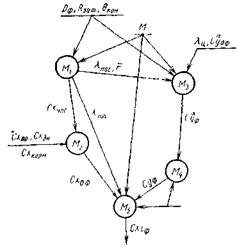
Рис.1. Пример ориентированною информационного графа модели
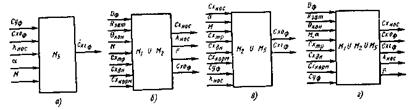
Рис. 2. Примеры агрегированных моделей
Гибкость исходной модели будем оценивать числом агрегированных моделей, которые могут быть сформированы на ее основе. Уровень такого рода гибкости определяется двумя факторами. Первым из них является степень разбиения исходной модели на элементарные модели (модули), представляющие собой программные модули — неделимые составные части ППП. Предельным в данном случае является отождествление скалярных и элементарных моделей. Однако при этом надо учитывать, что элементарная модель может включать в себя ряд связей, выделение каждой из которых в автономную программную единицу не имеет смысла (см. модель т1), так как вычисляемые ими значения не представляют самостоятельного интереса. Разделение исходной модели на элементарные модели производится при ее программной реализации, что исключает влияние способов реализации процедур формирования модуля на рассматриваемый фактор.
Вторым фактором, определяющим гибкость исходной модели, является применяемый способ формирования агрегированных моделей из ее элементарных составляющих. В частности, при использовании способов, базирующихся на представлении структуры исходной модели в виде ориентированного графа, допускается формирование лишь таких агрегированных моделей, входы и выходы которых содержатся во входах и выходах, соответственно, исходной модели. Такого рода формирование является наиболее распространенным и исследованным.
В то же время из требования гибкости, предъявляемого к процедурам формирования модуля, следует, что на одной и той же исходной математической модели должно допускаться решение задач в различных постановках. При этом переменные, которые в одних задачах являются входными, в других могут быть выходными и наоборот. Такого рода гибкость допустима лишь при описании элементарных моделей наборами входящих в них переменных без деления их на входные и выходные. Такое рассмотрение модели практически исключает ее представление в виде ориентированного графа, но обеспечивает расширенные возможности как при формировании расчетных моделей для выполнения проектных операций, так и при выполнении других процедур формирования модуля. Покажем это.
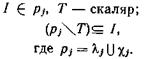
Будем считать, что задание на формирование расчетных моделей всегда может быть определено парой (І, Т), где І — вектор исходных переменных; Т — требуемые результаты моделирования. В частности, если выбор решений при выполнении некоторой операции Sij оптимизационного статуса основан на использовании свертки критериев, то для этой операции набор переменных, определяющих требуемую расчетную модель, может быть представлен в виде
![]() (1)
(1)
 (2)
(2)
Для выполнения операций расчетного статуса требуемая расчетная модель может быть представлена парой:
![]() (3)
(3)
![]() (4)
(4)
Рассмотрим некоторую скалярную модель предполагая fj явной функцией действительных переменных. Она соответствует заданию (I, Т), для которого
предполагая fj явной функцией действительных переменных. Она соответствует заданию (I, Т), для которого ![]() Однако нетрудно показать, что на базе этой же модели можно решить и ряд других задач, для которых
Однако нетрудно показать, что на базе этой же модели можно решить и ряд других задач, для которых
 (5)
(5)
Данные условия следуют из возможности решения уравнения
![]() относительно любой из компонент вектора
относительно любой из компонент вектора ![]() а не только λ. При этом разрешимость приведенного уравнения относительно некоторой переменной из
а не только λ. При этом разрешимость приведенного уравнения относительно некоторой переменной из ![]() равносильна переориентации графа модели.
равносильна переориентации графа модели.
В случае элементарной модели ![]() для которой
для которой в дальнейшем будем считать, что условие
в дальнейшем будем считать, что условие ![]() являющееся аналогом условия (5), обеспечивает разрешимость тj относительно любых
являющееся аналогом условия (5), обеспечивает разрешимость тj относительно любых ![]() компонент вектора
компонент вектора![]() Реализация переориентации
Реализация переориентации ![]() в этом случае может быть произведена, в частности, на базе оптимизационных методов решения уравнений. Значения
в этом случае может быть произведена, в частности, на базе оптимизационных методов решения уравнений. Значения ![]() далее будем называть рангом модели
далее будем называть рангом модели ![]() .
.
Исходя из сказанного, для последующего изложения исходную математическую модель объекта целесообразно представлять, как и раньше, в виде совокупности элементарных моделей. Но при этом не разделять их переменные на входные и выходные, а учитывать их ранг, т. е.
![]() (6)
(6)
Отметим, что если в качестве элементарной модели рассматривается модель, вектор выходных переменных которой является многомерным, то дуги, исходящие из определенной вершины, соответствуют различным переменным. Для того чтобы обеспечить полноту описания, приходится делать на дугах пометки (как в приведенном выше примере). Введение их определяет граф исходной модели как граф с помеченными дугами, исследование которого затруднительно. Все это делает целесообразным переход к представлению структуры модели в виде двудольного графа.
В дальнейшем будем представлять структуру исходной математической модели объекта в виде сети, интерпретируемой неориентированным двудольным графом, состоящим из двух групп вершин и соединяющих их ребер: в первую группу входят вершины, образованные операторами элементарных математических моделей, а во вторую — переменные, входящие в эти модели; ребра определяют факт присутствия переменных в соответствующих моделях. Далее такого рода графом будем представлять информационным графом модели. На рис. 3 в качестве примера показан информационный граф, соответствующий фрагменту математической модели ЛА, приведенному на рис. 1.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
