
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Решение системы (2) при малом h в целом хорошо имитирует решения уравнения (1) как в количественном, так и в качественном отношениях. Проверим, например, выполнение закона сохранения полной энергии для стержня конечной длины l, жестко закрепленного на концах. Тогда ![]() и в непрерывной модели выражение для полной энергии
и в непрерывной модели выражение для полной энергии ![]() имеет вид
имеет вид
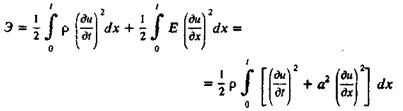
(выведите это выражение!). Применяя правило Лейбница о дифференцировании интеграла по параметру, получаем отсюда
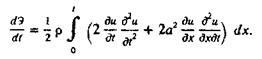
Пользуясь уравнением (1), выводим
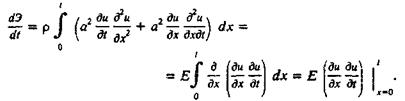
Но из предположения о жестком закреплении концов стержня следует, что  и потому
и потому ![]() Значит,
Значит, ![]() т. е.
т. е. ![]()
Проверим теперь аналогичное свойство для дискретной модели (2). Пусть точки имеют номера с i=0 до i=N, причем  и
и  (концы закреплены). Тогда выражениие для полной энергии таково:
(концы закреплены). Тогда выражениие для полной энергии таково:

После дифференцирования и применения уравнения (2) получаем
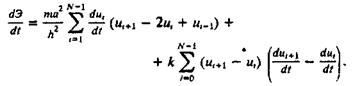 (3)
(3)
Раскрыв во второй сумме вторую скобку, проведем преобразование:
при последнем переходе мы учли, что индекс суммирования является немой переменной, т. е. может быть обозначен любой буквой и, кроме того, что![]() Отбросив член с
Отбросив член с ![]() находим отсюда
находим отсюда
Подставив это выражение, а также значения т и k в (3), получаем, что![]() (проверьте!), т. е.
(проверьте!), т. е. ![]()
Отметим попутно, что проверка выполнения в модели математических аналогов фундаментальных физических законов, таких, как закон сохранения энергии, подобная только что проведенной, является важным этапом контроля качественной адекватности этой модели. Такой контроль существен, в частности, при переходе от одной математической модели к другой — например, при упрощении уравнений модели, когда исследование в какой-то степени оторвалось от физической реальности.
Но есть и некоторые отличия между решениями уравнения (1) и системы (2), не только количественные, но и качественные. Так, далеее будет показано, что решениями уравнения (1) служат волны, бегущие по стержню с постоянной скоростью а без изменения своей формы; с той же скоростью распространяются и любые деформации, появившиеся в результате внешних воздействий. Для системы же (2) влияние внешних воздействий распространяется с формально бесконечной скоростью. Пусть, например, левый конец х=0 полубесконечного стержня начиная с момента t= 0 пришел в движение с постоянной скоростью ![]() Тогда график смещений в некоторый момент t > 0 для модели (1) показан на рис. 3 сплошной линией, а для модели (2) — штриховой.
Тогда график смещений в некоторый момент t > 0 для модели (1) показан на рис. 3 сплошной линией, а для модели (2) — штриховой.
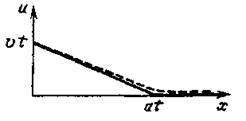
Pис. 3
Таким образом, дискретная модель получилась неадекватной по отношению к скорости распространения воздействий. Адекватность можно восстановить, если, например, пренебречь слишком малы - ми значениями смещений, считая, что воздействие дошло до какой-то точки, если смещение превзошло некоторое разумное значение![]()
3.4.3. Линейные и нелинейные модели
Линейная зависимость одной величины от другой — это пропорциональность их приращений, т. е. зависимость вида у = ах + b, откуда получаем ![]() (∆ — обычное обозначение приращения); аналогично, линейная зависимость величины от двух других — это зависимость вида
(∆ — обычное обозначение приращения); аналогично, линейная зависимость величины от двух других — это зависимость вида  откуда
откуда ![]() и т. д. Типичные линейные зависимости между физическими величинами — закон Гука (удлинение пропорционально силе растяжения), закон Ома, закон теплового расширения и т. д. В действительности все эти зависимости являются линейными лишь приближенно, но в соответствующих, обычно устанавливаемых эмпирически диапазонах изменения величин предположение о линейности выполняется с хорошей точностью и в то же время существенно упрощает исследование.
и т. д. Типичные линейные зависимости между физическими величинами — закон Гука (удлинение пропорционально силе растяжения), закон Ома, закон теплового расширения и т. д. В действительности все эти зависимости являются линейными лишь приближенно, но в соответствующих, обычно устанавливаемых эмпирически диапазонах изменения величин предположение о линейности выполняется с хорошей точностью и в то же время существенно упрощает исследование.
Аналогично определяется понятие линейной модели. Оно применяется для моделей объектов, рассматриваемых как преобразователи, для которых каждому входу соответствует некоторый выход. Так, если мы изучаем задачу о прогибе прямолинейного стержня под действием поперечной распределенной нагрузки, то входом можно считать ее плотность q(х), а выходом — прогиб у(х). Если изучается задача о вынужденных колебаниях осциллятора, то входом можно считать закон изменения внешней силы F(t), а выходом — закон колебаний х(t) и т. д. В математике такой преобразователь называется оператором. (Кстати, и любую функцию можно трактовать как преобразователь, у которого входом служит значение аргумента или набор значений аргументов, если их несколько, а выходом — значение функции.)
Будем считать, что начала отсчета входа и выхода выбраны так, что нулевому входу отвечает нулевой выход. Тогда модель называется линейной, если в ней выполнен принцип суперпозиции (наложения), т. е. при сложении входов складываются и выходы, а при умножении входа на любое число выход умножается на то же число. Если этот принцип не выполнен, модель называется нелинейной. Линейные модели обычно описываются линейными неоднородными уравнениями — алгебраическими, дифференциальными и т. д., в которых неоднородный член отвечает входу, а решение — выходу. Так, в первом примере предыдущего абзаца при сравнительно малых прогибах модель является линейной и, приняв для определенности, что концы х =а и х = b стержня шарнирно закреплены, получаем в качестве математической модели краевую задачу (т. е. задачу о решении дифференциального уравнения при заданных краевых условиях)
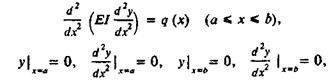 (1)
(1)
где Е — модуль Юнга, а І — геометрический момент инерции поперечного сечения относительно оси, проходящей через его центр масс параллельно оси z. Во втором примере, для осциллятора получаем задачу Коши (т. е. задачу с начальными условиями)
 (2)
(2)
Линейным является решение уравнения (1.4) во всем пространстве относительно начального условия
![]()
и т. д.
Свойство линейности модели существенно упрощает построение и исследование решения математической задачи. Так, если модель включает обыкновенное дифференциальное уравнение, как в примерах (8) и (9), такому исследованию помогает то, что решение такого уравнения стандартным способом выражается через так называемую фундаментальную систему решений, а если коэффициенты уравнения постоянные — то и непосредственно через экспоненты.
Целый ряд методов решения дифференциальных и иных уравнений был впервые разработан и наиболее эффективно применяется для случая, когда эти уравнения линейны. Напомним, например, как применяется классический метод разделения переменных (метод Фурье) к решению уравнения теплопроводности (1 п.3.1.4) в ограниченной области D) при заданном начальном условии ![]() и однородных граничных условиях I, II или III рода. Вначале строится соответствующая последовательность так называемых собственных функций удовлетворяющих в (D) уравнению
и однородных граничных условиях I, II или III рода. Вначале строится соответствующая последовательность так называемых собственных функций удовлетворяющих в (D) уравнению
 (3)
(3)
а на границе (D) — тому же условию, что и θ. Эти функции для наиболее простых областей (D) явно выписываются и приведены в справочниках, а в других случаях могут быть построены численно, причем основную роль играют первые из них, порой даже лишь функция φi, отвечающая наименьшему собственному значению Функции ![]() образуют в (D) так называемую ортогональную полную систему, откуда следует, что
образуют в (D) так называемую ортогональную полную систему, откуда следует, что ![]() допускает по ней разложение:
допускает по ней разложение:

коэффициенты которого можно подсчитать по формулам

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
