
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

(Напомним, что последовательность непрерывных или кусочно-непрерывных функций ![]() заданных на конечном интервале (а, b), образует на нем ортогональную систему, если все они ненулевые и
заданных на конечном интервале (а, b), образует на нем ортогональную систему, если все они ненулевые и
 (4)
(4)
Эта система называется полной, если любую непрерывную или кусочно-непрерывную функцию f(x), заданную на (а, b), можно разложить в ряд
 (5)
(5)
Коэффициенты этого ряда легко найти с помощью свойства (4):
 (6)
(6)
(докажите!). Например, хорошо известна полная ортогональная система функций ![]() на интервале
на интервале![]() Для нее ряд (5) — это ряд Фурье.
Для нее ряд (5) — это ряд Фурье.
Аналогично рассматриваются полные ортогональные системы функций нескольких аргументов.)
Так как каждой функции ![]() взятой в качестве начальной, отвечает решение
взятой в качестве начальной, отвечает решение  то, в силу принципа суперпозиции, начальной функции θ0 отвечает решение
то, в силу принципа суперпозиции, начальной функции θ0 отвечает решение
 (7)
(7)
которое и является искомым.
Проведенное рассуждение имеет область применимости, значительно выходящую за рамки уравнения (1 п.3.1.4), и существенно опирается на линейность задачи уже при отделении переменной t, т. е. при переходе от уравнения (1 п.3.1.4) к уравнению (3). Аналогичным образом в случае неограниченной области (D) применяется интегральное представление решения, которое строится с помощью того или иного интегрального преобразования по пространственным переменным, чаще всего — так называемого преобразования Фурье. Широко известно также преобразование Лапласа по времени, приводящее к операционному исчислению; это исчисление также применяется почти исключительно к линейным задачам.
Весьма благоприятна линейность задачи и для таких распространенных методов приближенного решения дифференциальных уравнений (обыкновенных и с частными производными), как метод Галеркина в его различных вариантах и метод конечных элементов (см. Добавление, п. 3). Хотя в принципе эти методы применимы и к нелинейным задачам, но естественно, что системы из большого числа конечных уравнений, к которым они приводят, гораздо легче решаются в линейном, чем в нелинейном случае. Это относится и ко многим другим приближенным методам.
Необходимо иметь в виду, что существуют принципиально нелинейные объекты (в том числе явления), для которых применение линейных моделей приводят к грубым искажениям картины. Это прежде всего системы, для которых изменение масштаба воздействия приводит к качественному изменению результата. Типичным примером могут служить механические системы с сухим трением, для которых малая сила не порождает движения, а большая — порождает; вообще, наличие любых барьеров подобного рода — это типичный нелинейный эффект. Существенно нелинейной является также задача об изучении околокритического состояния объекта, зависящего от параметров, когда при их изменении устойчивость сменяется неустойчивостью или один тип движения - другим и т. п. Во всех таких случаях надо применять методы нелинейного анализа, которые можно найти в специальной литературе.
3.4.4. Линеаризация
Выгоды линейности бывают столь велики, что приближенная замена нелинейных соотношений на линейные, нелинейных моделей на линейные, т. е. линеаризация соотношений, моделей и т. д. весьма распространена. Такая линеаризация обычно проводится в двух случаях: либо если эксперимент показывает (как, например, для закона Гука), что отклонение от линейности в рассматриваемых диапазонах изменения переменных невелико и несущественно, либо же, если эти диапазоны малы и мы заменяем приращения переменных на их дифференциалы, отбрасывая члены высшего порядка малости. (Во втором случае применяется также линейное интерполирование.) Покажем последнюю процедуру на формальном примере. Пусть величины х, у, z связаны уравнением
![]() (1)
(1)
Это уравнение при ![]() удовлетворяется.
удовлетворяется.
Пусть теперь эти величины мало изменились, т. е. стало
![]() где
где малы. Тре-
малы. Тре-
буется найти линейное соотношение между  справедливое с точностью до членов высшего порядка малости; другими словами, требуется провести линеаризацию уравнения (1) вблизи указанных значений х, у, z (говорят также — «при этих значениях»). Для этого продифференцируем обе части уравнения (1):
справедливое с точностью до членов высшего порядка малости; другими словами, требуется провести линеаризацию уравнения (1) вблизи указанных значений х, у, z (говорят также — «при этих значениях»). Для этого продифференцируем обе части уравнения (1):

Подставив сюда вместо х, у, z их исходные значения, а вместо дифференциалов — приращения соответствующих переменных (при этом мы пренебрегаем величинами высшего порядка малости — в этом и состоит линеаризация), получим
![]()
т. е.
![]()
Линеаризованное уравнение несравненно проще исходного. Его можно записать и в переменных х, у, z.
![]()
т. е.
![]()
Геометрический смысл проведенной линеаризации таков: мы получили уравнение касательной плоскости к поверхности (1) в пространстве x,y,z в заданной точке (2, - 1, 0).
В качестве другого примера рассмотрим дифференциальное уравнение
 (2)
(2)
имеющее очевидное частное решение ![]() Пусть близкое решение имеет вид
Пусть близкое решение имеет вид  Чтобы получить линеаризованное уравнение для η, варьируем уравнение (2):
Чтобы получить линеаризованное уравнение для η, варьируем уравнение (2):
![]()
(Вариация функции появляется при рассмотрении операторов (преобразователей функций в функции, см. п. 3.4.3) и функционалов (преобразователей функций в числа). Тек, если задан оператор ![]() где y = y (х) — вход, a z = z (х) — выход, то вариация
где y = y (х) — вход, a z = z (х) — выход, то вариация
![]()
функции у = у (х) — это ее приращение, полученное при переходе от у к некоторой другой, близкой функции ![]() т. е.
т. е. ![]() (см. рис. 1; сравните:
(см. рис. 1; сравните:![]() получается при сохранении функции у(х), но изменении значения х).
получается при сохранении функции у(х), но изменении значения х).
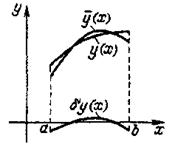
Pис. 1
Вариация оператора получается, если в его приращении ![]() оставить только линейные члены относительно δу и отбросить члены высшего порядка малости. Варьирование (вычисление вариации) оператора производится по тем же правилам, что и дифференцирование функции, причем надо полагать
оставить только линейные члены относительно δу и отбросить члены высшего порядка малости. Варьирование (вычисление вариации) оператора производится по тем же правилам, что и дифференцирование функции, причем надо полагать ![]()
![]() и т. д., подобно тому, как это делается при вычислении смешанной производной функции нескольких переменных. Пример вычисления вариации оператора — левой части уравнения (2) — приведен в тексте. Аналогично определяется и вычисляется вариация функционала.)
и т. д., подобно тому, как это делается при вычислении смешанной производной функции нескольких переменных. Пример вычисления вариации оператора — левой части уравнения (2) — приведен в тексте. Аналогично определяется и вычисляется вариация функционала.)
Подставив сюда ![]() получаем искомое
получаем искомое
уравнение

которое легко решается.
На последовательной линеаризации основан один из самых эффективных методов приближенного решения нелинейных уравнений различных типов — метод Ньютона. Опишем его сначала на примере решения конечного уравнения общего вида
![]() (3)
(3)
Метод имеет итерационный характер (см. Добавление, п. 4). Пусть мы отправляемся от некоторого нулевого приближения решения: ![]() Проведем линеаризацию функции f при
Проведем линеаризацию функции f при ![]() для чего разложим ее в ряд Тейлора по степеням
для чего разложим ее в ряд Тейлора по степеням ![]() и отбросим в разложении все нелинейные члены. Тогда взамен (3) мы получим линеаризованное уравнение
и отбросим в разложении все нелинейные члены. Тогда взамен (3) мы получим линеаризованное уравнение ![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
