
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В СТО угол ортосферического сдвига Θ13 имеет чисто релятивистскую природу. Реально из исходного базиса![]() этот релятивистский эффект воспринимается таким образом, что неточечный объект в результате суммирования двух поступательных, но неколлинеарных скоростей воспринимается наблюдателем N1 сферически повёрнутым в плоскости, задаваемой векторами v12 и v23. Этот геометрический эффект дополняет лоренцево сокращение того же объекта (в повёрнутом виде) в направлении вектора суммарной скорости v13. Аналогичный эффект ортосферического сдвига проявляется в гиперболической и в сферической геометриях для неколлинеарного суммарного поступательного движения неточечных объектов или координатного базиса.
этот релятивистский эффект воспринимается таким образом, что неточечный объект в результате суммирования двух поступательных, но неколлинеарных скоростей воспринимается наблюдателем N1 сферически повёрнутым в плоскости, задаваемой векторами v12 и v23. Этот геометрический эффект дополняет лоренцево сокращение того же объекта (в повёрнутом виде) в направлении вектора суммарной скорости v13. Аналогичный эффект ортосферического сдвига проявляется в гиперболической и в сферической геометриях для неколлинеарного суммарного поступательного движения неточечных объектов или координатного базиса.
Впервые угол ортосферического сдвига в скалярной форме был выявлен Зоммерфельдом (1931г.) для сложения двух ортогональных скоростей с трактовкой на сфере мнимого радиуса по формулам гиперболической геометрии. Это имело целью дать наглядную трактовку релятивистского коэффициента «1/2» в прецессии Томаса.
Тензорные углы Г13 и ![]() отличаются только векторами своих направляющих косинусов. Поэтому результат суммирования двух движений в векторной и в тензорной формах не зависит от порядка их последовательности тогда и только тогда, когда направляющие косинусы этих движений либо равны, либо аддитивно противоположны, то есть когда ротационные матрицы тригонометрически согласованы. Заметим, что итоговый результат в скалярной форме для двух движений от этого порядка не зависит.
отличаются только векторами своих направляющих косинусов. Поэтому результат суммирования двух движений в векторной и в тензорной формах не зависит от порядка их последовательности тогда и только тогда, когда направляющие косинусы этих движений либо равны, либо аддитивно противоположны, то есть когда ротационные матрицы тригонометрически согласованы. Заметим, что итоговый результат в скалярной форме для двух движений от этого порядка не зависит.
Пусть ![]() - вектор направляющих косинусов для Г12,
- вектор направляющих косинусов для Г12,
sh γ12, th γ12 и v12 в декартовом суббазисе ![]() - вектор
- вектор
направляющих косинусов для![]() в декартовом
в декартовом
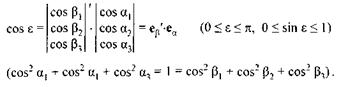
суббазисе![]() Определим условную характеристику ε - угол между
Определим условную характеристику ε - угол между
еα и еβ, как если бы они находились в одном и том же ![]() через
через
формальное значение его косинуса:
 (119А)
(119А)
Если частные косинусы попарно равны, то cos ε= +1. Если они попарно аддитивно противоположны, то cos ε=- 1. Соответственно тогда v12 и v23 условно коллинеарны, но либо однонаправленно, либо разнонаправленно. Если же cos ε = 0, то v12 и v23 условно сферически ортогональны. В общем случае эти векторы образуют условно угол ε.
Далее вычисляем элементы итоговой гиперболической матрицы roth Г13, согласно (114А). Из них найдем значения характеристик суммарного движения, в том числе его направляющие косинусы cos σ1, cos σ2, cos σ3 в декартовом суббазисе ![]() В свою очередь, для обратного порядка последовательности движений скалярный гиперболический угол итогового движения (в матрице
В свою очередь, для обратного порядка последовательности движений скалярный гиперболический угол итогового движения (в матрице![]() есть тот же γ13. В тензорной форме он имеет направляющие косинусы
есть тот же γ13. В тензорной форме он имеет направляющие косинусы![]()
![]() Из (113А) вытекает, что
Из (113А) вытекает, что
 (120 А)
(120 А)
Связь между двумя вариантами двухступенчатого движения (прямым и обратным) сводится к замене частных углов по схеме:
![]() (121А)
(121А)
Сначала найдём элементы матрицы-произведения в (114А):
![]()
При этом для дальнейших вычислений требуются только элементы её четвёртой строки. Гиперболические матрицы roth Г здесь можно использовать в любой из канонических форм (363) или (364). Далее:
Затем вычисляем нижний диагональный элемент (скаляр) матрицы  перемножая четвёртую строку В на четвёртый столбец roth Г12:
перемножая четвёртую строку В на четвёртый столбец roth Г12:
Отсюда сразу же следует известная скалярная косинусная формула гиперболической неевклидовой геометрии Лобачевского - Больяи:
 (122 А)
(122 А)
В неевклидовой геометрии (п — ε) = А123 — внутренний угол треугольника между сторонами «12» и «23»; в СТО ε - соответствующий внешний угол. При реальном физическом движении материи все γ > 0 (на верхней и нижней частях гиперболоида Минковского), что в СТО соответствует ∆ct > 0 (движение в будущее). С учётом этого из (122А) для положительных углов движения (и расстояний по метрике Ламберта) следует правило "параллелограмма", как в евклидовой геометрии:
![]() (123А)
(123А)
При этом направляющие косинусы углов движения или их тригонометрических проекций в евклидовых подпространствах изменяются в пределах от - 1 до + 1. Неравенства (123 А) и γ > 0 относят расстояние в гиперболической геометрии в категорию норм.
Соответствующая формула для скалярного синуса получается из (122А) тригонометрическим способом в виде суммы двух квадратов:
![]() (124 А)
(124 А)
Из (122 А) и (124А) находим формулу для скалярного тангенса в том же виде:
 (125А)
(125А)
Последняя приводится к классическому варианту (здесь также в тригонометрической форме):

В (122 А) и (126 А) непосредственно видна независимость суммарной скалярной скорости и угла движения от порядка последовательности двух складываемых скоростей или движений. Это тригонометрическая формулировка в скалярной форме классического закона сложения двух координатных скоростей Пуанкаре - Эйнштейна. Но, как следует из ранее изложенного, закон сложения скоростей или движений в полном виде должен содержать ещё информацию об ортосферическом сдвиге применительно к неточечным объектам. С другой стороны, из (124А) непосредственно следует родственный закон сложения двух собственных скоростей в скалярной синусной форме.
Ещё в одном варианте закон сложения двух скоростей выражается через релятивистские факторы (которым здесь отвечают секансы углов движения). Непосредственно из (122А) вытекает секансное соотношение:
![]() (127А)
(127А)
Кроме того, формулы (122А), (124А), (126А), (127А) позволяют трактовать тригонометрическим образом правило сложения двух гиперболических отрезков или углов гиперболического движения в скалярной форме со стороны различных гиперболических функций. Если cos ε = ±1, то из них следует простейшее аддитивное правило (69А). Если cos ε = 0, то для суммы двух условно ортогональных друг другу гиперболических отрезков или движений следуют частные тригонометрические формулы:
![]() (128А)
(128А)  (129А)
(129А)  (130А)
(130А)
Но в трёхмерном евклидовом пространстве взаимно ортогональными могут быть максимально три вектора. Выполнив последовательно два акта суммирования трёх условно ортогональных отрезков или движений, выводим соответствующие трёхступенчатые скалярные тригонометрические формулы. (В данном частном случае суммарный скалярный угол также не зависит от порядка последовательности частных движений.) Для суммы трёх ортогональных отрезков имеем:
 (131А)
(131А)  (132А)
(132А)
![]() (133А)
(133А)
Если здесь хотя бы один из частных углов бесконечен (то есть γ=∞, th γ= 1, v = ± с), то аналогичное имеет место и для общего угла. Это соответствует скоростному постулату Эйнштейна (15 А). Условно ортогональное суммирование движений (например, в виде проекций в ортогональных криволинейных координатах Гаусса) естественным образом обобщается для n-мерной геометрии Лобачевского — Больяи, что весьма просто выражается в мультипликативной коммутативной косинусной интерпретации:
![]()
Итоговый скалярный угол γ1t (и соответственно расстояние a1t = R∙γ1t) не зависит от порядка последовательности частных условно ортогональных движений. Например, протяжённость суммарного условно ортогонального движения по гиперболоиду в <Рn+1> или в пространстве Лобачевского — Больяи определяется в виде:

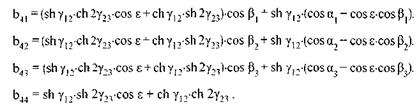
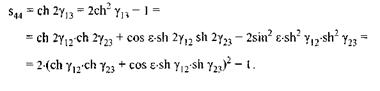
Далее с точки зрения тензорной тригонометрии вычисляем направляющие косинусы итоговой двухступенчатой ротации Г13 и соответственно векторов th γ13, sh γ13 и v13 в декартовом суббазисе ![]() Воспользуемся тем фактом, что они тождественны для матриц roth Г и roth 2Г. Вслед за элементом s44 матрицы roth2 Г]13 = roth 2Г13 в (114А) вычисляем её остающиеся нижние элементы, перемножая четвёртую строку В на k-й столбец roth Г12 (k = 1,2,3):
Воспользуемся тем фактом, что они тождественны для матриц roth Г и roth 2Г. Вслед за элементом s44 матрицы roth2 Г]13 = roth 2Г13 в (114А) вычисляем её остающиеся нижние элементы, перемножая четвёртую строку В на k-й столбец roth Г12 (k = 1,2,3):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
