
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (323)
(323)
Указанное соответствие определяется здесь как сферическо-гипербо:шческая аналогия абстрактного типа. Углы-аналоги при этой замене имеют абстрактный смысл (но при сохранении бинарной тензорной структуры). Далее углы могут использоваться конкретно. В частности, применив к (295), (297) или более широко к (277)—(286) абстрактную аналогию по схеме (322), получаем гиперболические аналоги в вещественном псевдоевклидовом пространстве с тем же рефлектор-тензором ![]() в том числе в канонической форме в
в том числе в канонической форме в
тригонометрическом базисе диагонального косинуса.  (324)
(324)
 (325)
(325)
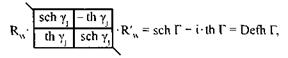
Это гиперболическая ротационная матрица-функция моторного угла Г или (- Г).
 (326)
(326)
![]() (327)
(327)
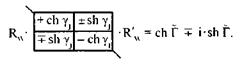
Это гиперболическая деформационная матрица-функция моторного угла Г или (— Г).
 (328)
(328)
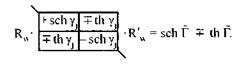
Это гиперболически ортогональный рефлектор по отношению к тензору ![]()
 (329)
(329)
Это гиперболически косогональный рефлектор по отношению к тензору ![]() (В этих определяющих формулах
(В этих определяющих формулах ![]() - гиперболический
- гиперболический
проективный угол, Г - гиперболический моторный угол.)
В псевдоевкчидовой тригонометрии срединный рефлектор с максимальным тригонометрическим рангом угла задаёт не только тригонометрический базис, но и рефлектор-тензор ориентированного псевдоевклидова пространства

Ему же отвечает некоторое собственное подмножество нуль-простых матриц <Вр>. Применяя принцип бинарности с учётом (271) и (324), получаем аннигилирующее соотношение - аналог такового для сферической ортогональной матрицы:
 (330)
(330)
В свою очередь, модальное преобразование, обратное (271), производит псевдосферические углы и функции из гиперболических. Тензорный угол {iГ} имеет сферический характер. Псевдосферическая тригонометрия в тензорном варианте реализуется в комплексном квазиевклидовом пространстве с бинарной структурой, согласно (271). Скалярное произведение в данном пространстве тождественно таковому в исходном псевдоевклидовом пространстве:
![]()
Такого вида пространство обычно применяют как комплексный квазиевклидов аналог вещественному псевдоевклидову пространству. (Впервые оно было введено Пуанкаре в 1905г. как метрическое пространство с группой преобразований Лоренца.) Далее, применив к псевдосферическим понятиям абстрактную аналогию по схеме (323), получаем первичные сферические аналоги в вещественном евклидовом пространстве. Это приводится, конечно, только для завершения в целом картины абстрактной аналогии, так как в итоге круг преобразований замкнулся.
С применением абстрактной сферическо-гиперболической аналогии получаем формулы связи проективных и моторных углов и их функций через срединный рефлектор (268)-(270). Например, имеем:
![]()
Для описания сферических и гиперболических преобразований на какой-либо собственной плоскости/псевдоплоскости (поклеточно) далее используется общая тригонометрическая диаграмма. Тут изначально нет какой-либо связи между вещественными сферическими и гиперболическими углами, что характерно для абстрактной аналогии. Для того чтобы в исходном декартовом базисе ![]() установить отношение изоморфизма между сферическими и гиперболическими тригонометрическими функциями, нужно задать какую-либо однозначную взаимосвязь углов-аргументов.
установить отношение изоморфизма между сферическими и гиперболическими тригонометрическими функциями, нужно задать какую-либо однозначную взаимосвязь углов-аргументов.
13.14. Сферическо-гиперболическая аналогия конкретного типа
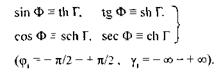
Обратим внимание на то, что множества значений сферических и гиперболических синусов и тангенсов скалярных углов тождественны:
![]() (331)
(331)
Отсюда между углами-аргументами устанавливается взаимосвязь.
![]()
Согласно тригонометрической диаграмме (рис. 3), главные значения сферических углов, как и ранее, берутся в интервале ![]() При этом значения сферического косинуса и секанса для них неотрицательны. Поэтому тождества (331) можно дополнить ещё двумя аналогами:
При этом значения сферического косинуса и секанса для них неотрицательны. Поэтому тождества (331) можно дополнить ещё двумя аналогами:
![]() (332)
(332)
При тригонометрических преобразованиях планаров и двухвалентных тензоров вполне достаточно использовать вышеуказанный интервал для собственных сферических углов. На тождествах (331) базируется сферическо-гипербопическая аналогия конкретного типа. Она же есть синус-тангенсная аналогия. В её тензорном варианте, или с тождествами по бинарным клеткам, эта аналогия представляется в виде:
 (333)
(333)
Далее в исходном единичном базисе![]() она распространяется на все типы тригонометрических матриц-функций:
она распространяется на все типы тригонометрических матриц-функций:
![]() (334)
(334)
 (335)
(335)
Отсюда следует функциональная связь обоих углов моторного типа:
![]() (336)
(336)
Характеристические рефлекторы (178), (179), (211), (212) в том же варианте принимают вид:
 (337)
(337)
 (338)
(338)
 (339)
(339)
 (340)
(340)
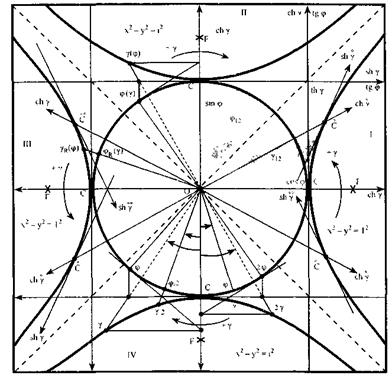
Рис. 3. Тригонометрическая диаграмма на плоскости/псевдоплоскости в правом универсальном базисе и сферическо-гиперболическая аналогия: φ — сферический угол, γ - гиперболический угол;
I, ІІ, ІІІ и IV суть 1-й, 2-й, 3-й и 4-й гиперболические квадранты для отображения скалярных гиперболических углов на псевдоплоскости;
![]() - положительный и отрицательный углы гиперболической ротации в универсальном базисе, определяемые парой вещественных гипербол, как примеры в 1-м и 3-м квадрантах;
- положительный и отрицательный углы гиперболической ротации в универсальном базисе, определяемые парой вещественных гипербол, как примеры в 1-м и 3-м квадрантах;
![]() - примеры сферическо-гиперболической аналогии синус-тангенсного типа (во 2-м квадранте);
- примеры сферическо-гиперболической аналогии синус-тангенсного типа (во 2-м квадранте);
![]() - примеры сферическо-гиперболической аналогии тангенс-тангенсного типа (в 3-м квадранте);
- примеры сферическо-гиперболической аналогии тангенс-тангенсного типа (в 3-м квадранте);
в 4-м квадранте даны примеры бисекции (слева) и удвоения (справа) гиперблического угла в универсальном базисе с использованием вышеуказанных аналогий.
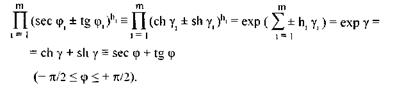
С использованием сферическо-гиперболической аналогии обоих типов моторные матрицы-функции преобразуются друг в друга по нижеуказанному квартовому кругу:
 (341)
(341)
Для тригонометрически согласованных гиперболических ротационных матриц и ортогональных рефлекторов действуют Правила №2 и №3. Для скалярных тригонометрических функций правила выполняются автоматически, так как у них n = 2. В частности, имеем:
Синус-тангенсная аналогия позволяет придать гиперболически ортогональную форму ранее рассмотренным собственным аффинным проекторам, квазиобратной матрице и рефлекторам, получая те же соотношения, что и для сферических прототипов, но в гиперболическом варианте, а именно:
![]() (342)
(342)
То есть двукратная рефлексия типа ![]()
- простой несимметричный корень, есть гиперболическая ротация по
аналогии с (245):
![]() (343)
(343)
Здесь из матрицы в квадратных скобках извлекается арифметический корень и он же в данном случае гиперболический тригонометрический корень, аналогичный сферическому. Для пары неориентированных векторов или планаров ранга 1 при условии ![]() однозначно
однозначно
вычисляется собственная элементарная ротационная матрица (т =1):
 (344)
(344)
где ![]() в том числе
в том числе ![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
