
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
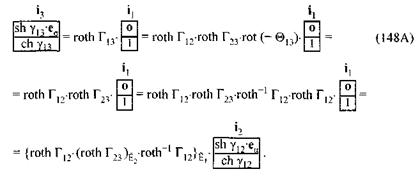 Траектория гиперболического (геодезического) движения i2→i3 принадлежит сечению гиперболоида II псевдоплоскостью ротации матрицы
Траектория гиперболического (геодезического) движения i2→i3 принадлежит сечению гиперболоида II псевдоплоскостью ротации матрицы Аналитически она производится
Аналитически она производится
при непрерывном преобразовании i → (i + di) путём изменения в матрице roth Г23 значения скалярного угла от 0 до γ23 при еβ = const. В модели Клейна внутри абсолюта, или тангенсной модели (рис. 4) эта траектория отображается прямолинейным отрезком th γ23. На гиперболоиде II нетрудно реализовать гиперболический треугольник (и далее другие многоугольники) через полярное представление:

Централизованный треугольник <u1, u2, u3> трансформируется в произвольный треугольник путём активного преобразования координат в том же ![]()
Гиперболоид I
![]() (149 А)
(149 А)
- 4×1 единичный радиус-вектор точки гиперболоида I. Метрический инвариант выражаетсяв виде:
![]() (150А)
(150А)
Остальные тригонометрические функции получаются делением базового элемента е либо на ch γ, либо на sh γ. Далее,
![]() радиус-вектор секанса, конец которого лежит на тангенсно-катангенсной цилиндрической евклидовой гиперповерхности (нулевому значению секанса соответствует принадлежность вектора изотропному конусу),
радиус-вектор секанса, конец которого лежит на тангенсно-катангенсной цилиндрической евклидовой гиперповерхности (нулевому значению секанса соответствует принадлежность вектора изотропному конусу),
![]()
![]() радиус-вектор косеканса,
радиус-вектор косеканса,
конец которого лежит на тангенсно-котангенсной евклидовой гиперплоскости (нулевому значению косеканса соответствует принадлежность вектора изотропному конусу),
![]()
(Все эти векторы пространствуподобны.)
Допустимое гиперболическое преобразование (движение) какого-либо точечного элемента ![]() единичного гиперболоида І в активной форме в
единичного гиперболоида І в активной форме в ![]() представляется в виде:
представляется в виде:
 (151А)
(151А)
В силу топологии модели Клейна вне абсолюта, гомеоморфной гиперболоиду I и псевдосфере Бельтрами (рис. 4), понятно, что между произвольными элементами е2 и е3 не всегда может быть реализовано чисто гиперболическое движение. (В этом же особенность геометрии в большом для гиперболоида I.) Движение roth Г2→3 реализуется тогда и только тогда, когда котангенсные проекции элементов е2 и е3 в модели Клейна вне абсолюта можно соединить прямолинейным отрезком cth γ23, не пересекая и не касаясь овального абсолюта внутри отрезка, и при этом наоборот, пересекая овальный абсолют вне отрезка, то есть его прямолинейным продолжением.
В простейшем случае ![]() согласно реверсивному
согласно реверсивному
аналогу (135А); при этом имеем:
![]()
Исходя из преобразования е3 = Т∙е2 в общей комбинированной форме с учётом промежуточного приведения элементов к виду (149А), то есть к ![]() в базисе
в базисе![]() имеем:
имеем:
![]() (152 А)
(152 А)
В частности, в указанном выше случае![]()
Тогда заключаем, что матрица гиперболического движения е2 → е3, по
гиперболоиду I та же, что и для гиперболоида II при движении![]()
* * *
Используя аналогичным образом матричный подход ротационной тензорной тригонометрии, но уже в самом общем случае, определим далее основные итоговые характеристики (скалярные, векторные, тензорные) для многоступенчатого (суммарного) гиперболического движения. При этом установим также в самой общей форме закон суммирования частных движений в гиперболической геометрии и, что тождественно, - общий закон сложения скоростей в СТО. В этом случае матрица движения Т, или она же — матрица непрерывного однородного преобразования Лоренца имеет общую тригонометрическую каноническую форму, выражаемую в ![]() в виде:
в виде:
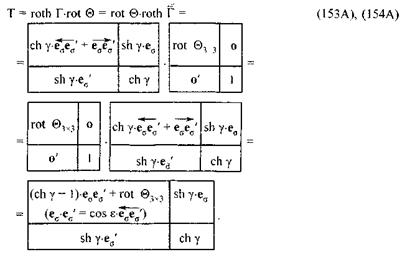
Матрица roth Г вычисляется по формуле (114А). Матрица rot Θ в целом выражается канонической формой (497). Здесь она вычисляется либо по формуле (115А), либо через представление (497) с использованием при этом значений ![]() и формул (120А), (499). Далее имеем:
и формул (120А), (499). Далее имеем:
 (155А)
(155А)
Вместе с полярным представлением (153 А) формулы (154А). (155А) дают в генеральной форме закон суммирования многоступенчатых движений в геометрии Лобачевского - Больяи и соответственно физических скоростей в СТО. Скалярные параметры движения не изменяются при зеркальной перестановке частных движений. Но зеркальная перестановка вызывает транспонирование общей матрицы тензора движения Т при исходном базисе ![]()
Тензорная тригонометрия в рассматриваемом здесь варианте применима к решению разнообразных задач гиперболической геометрии и кинематики СТО. Она представляет особый интерес для геометрических объектов, задаваемых внешним образом в псевдоевклидовом пространстве Минковского. Например, длины и расстояния вычисляются через γ и dγ; площади фигур - через θ и dθ; объёмы тел - через площади и ортогональные им высоты.
* * *
Вернёмся к закону суммирования движений в скалярной и векторной тангенсных формах (125А) и (138А). С точки зрения модели Клейна внутри абсолюта (рис. 4) в универсальном базисе суммирование тангенсных проекций начинается из центра проектирования О - общего центра всех псевдодекартовых базисов![]() Первая тангенсная проекция угла th γ12 евклидово не искажается. Как вектор она исходит из точки О (рис. 4А). Последующие тангенсные проекции th γ23, th γ34 и т. д. прилагаются в конце предыдущего вектора и в общем случае евклидово искажаются по длине. Далее суббазис
Первая тангенсная проекция угла th γ12 евклидово не искажается. Как вектор она исходит из точки О (рис. 4А). Последующие тангенсные проекции th γ23, th γ34 и т. д. прилагаются в конце предыдущего вектора и в общем случае евклидово искажаются по длине. Далее суббазис![]() играет роль
играет роль
однородных координат. Согласно ортогональному тангенсному представлению (125А) и (138А). перпендикулярная проекция искажённого вектора th γ23вычисляется в![]() следующим образом:
следующим образом:
 (156А)
(156А)
Соответствующая ей параллельная проекция искажённого вектора th γ23 вычисляется как разность искажённой параллельной проекции в (138 А) и её неискажённой части th γ12:
 (157 А)
(157 А)
В векторной сумме, составляющей th γ13 [рис. 4А (2)], искажается только второй вектор th γ23. Заметим, что для катетов (156А), (157А) и гипотенузы th γ23 в прямоугольном треугольнике «22'3» теорема Пифагора не выполняется, так как ни один из катетов не исходит из начала универсального базиса![]() а формально — в силу их искажения. В (156А), (157А) фигурируют три коэффициента искажения:
а формально — в силу их искажения. В (156А), (157А) фигурируют три коэффициента искажения:
 - коэффициент, вызванный гиперболическим суммированием отрезков γ12 и
- коэффициент, вызванный гиперболическим суммированием отрезков γ12 и ![]() ;
;
 - коэффициент, вызванный поправкой на изменение знаменателя-косинуса в (138А), или релятивистской поправкой на изменение координатного времени в точке О', где осуществляется суммирование, при его преобразовании
- коэффициент, вызванный поправкой на изменение знаменателя-косинуса в (138А), или релятивистской поправкой на изменение координатного времени в точке О', где осуществляется суммирование, при его преобразовании 
 — коэффициент, вызванный перекрёстным характером проецирования в модели Клейна вектора
— коэффициент, вызванный перекрёстным характером проецирования в модели Клейна вектора  lf параллельно
lf параллельно ![]() или тождественным ему лоренцевым сокращением.
или тождественным ему лоренцевым сокращением.
В отличие от предыдущих последний коэффициент k3 воздействует только на параллельную проекцию вектора th γ23. Заметим, что ![]() есть собственное евклидово подпространство в базисе
есть собственное евклидово подпространство в базисе ![]() где матрица roth Г12 полностью определяется значениями γ12 и его еα.
где матрица roth Г12 полностью определяется значениями γ12 и его еα.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
