
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Однако все частные ротации должны быть тригонометрически согласованы с тензором ![]() Данное согласование, имея ввиду структуры ротационных матриц и тензора, означает следующее. Сферические ротации, согласно (468). должны отвечать либо положительной, либо отрицательной единичным частям тензора, либо быть их произведением, необходимо коммутативным:
Данное согласование, имея ввиду структуры ротационных матриц и тензора, означает следующее. Сферические ротации, согласно (468). должны отвечать либо положительной, либо отрицательной единичным частям тензора, либо быть их произведением, необходимо коммутативным:
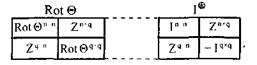 (473)
(473)
Гиперболические ротации, согласно (469), своими тригонометрическими клетками должны отвечать двум равным блокам, взятым из положительной и отрицательной единичных частей рефлектор-тензора. В частности, при q = 1 они имеют формы (363), (364).
13.33. Полярное представление псевдоевклидовых ротаций
Любое линейное непрерывное геометрическое преобразование в пределах одной из вышеуказанных полостей изотропного конуса всегда сводится к какому-то тригонометрическому преобразованию из группы <Т>. При этом в универсальном базисе любое общее преобразование (460) через полярное представление сводится к произведению одной ортосферической и одной гиперболической ротационных матриц:
![]() (474), (475) где
(474), (475) где
![]()
![]()
![]() (476)
(476)
Полярное представление выводится следующим образом:
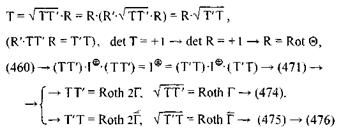
Отметим, что в силу (476), ![]() и Г имеют один и тот же спектр <γj >.
и Г имеют один и тот же спектр <γj >.
Далее полярное представление-произведение общего ротационного преобразования применяется для упрощённого описания многоступенчатых гиперболических ротаций и, в частности, таковых релятивистских движений в СТО, а также многоступенчатых движений во внешних и во внутренних сферической и гиперболической геометриях. Заметим, что в классическом полярном представлении модального линейного преобразования
![]() (477), (478)
(477), (478)
матрицы R и ![]() выражены в координатах какого-либо единичного
выражены в координатах какого-либо единичного
декартова базиса. В этом базисе они являются самостоятельными преобразованиями - ортогональным и симметричным. Но по геометрической сути полярного представления эти преобразования действуют последовательно, а именно оотогональное — в базисе ![]() симметричное - в базисе
симметричное - в базисе ![]() Поэтому второе
Поэтому второе
преобразование![]() нужно транслировать из координат базиса
нужно транслировать из координат базиса![]()
в координаты базиса![]() Тогда обе матрицы в пооизведении (477) выражаются в исходном базисе
Тогда обе матрицы в пооизведении (477) выражаются в исходном базисе  Если же использовать матрицы преобразований в координатах базисов, где они действуют, то есть в исконном виде, то тогда их последовательность в полярном представлении становится обратной, что соответствует (478). В этом заключается суть различия между формами (477) и (478). Тот же смысл наглядно проявляется при пассивном преобразовании координат одного и того же линейного элемента:
Если же использовать матрицы преобразований в координатах базисов, где они действуют, то есть в исконном виде, то тогда их последовательность в полярном представлении становится обратной, что соответствует (478). В этом заключается суть различия между формами (477) и (478). Тот же смысл наглядно проявляется при пассивном преобразовании координат одного и того же линейного элемента:
![]() (479)
(479)
где каждое из обратных преобразований действует в своем базисе.
В линейном псевдоевклидовом пространстве выделим множество правых псевдодекартовых базисов![]() Все они ротационно кон-
Все они ротационно кон-
груэнтны. Переход из ![]() к новому базису
к новому базису![]() согласно (474). (475), представляется в двух полярных формах:
согласно (474). (475), представляется в двух полярных формах:  (480)
(480) ![]() (481)
(481)
Здесь ротационные матрицы![]() выражены в координатах
выражены в координатах
какого-либо единичного универсального базиса. В этом базисе их можно рассматривать как самостоятельные ротационные преобразования - сферическое и гиперболическое. Но в полярном представлении они действуют последовательно. А именно, сферическое - в базисе ![]() гиперболическое - в базисе
гиперболическое - в базисе ![]() После трансляции
После трансляции
второго преобразования из ![]() обе матрицы выражаются в
обе матрицы выражаются в ![]() что
что
соответствует (480). Если же использовать матрицы преобразований в координатах базисов, где они действуют, то тогда их последовательность в полярном представлении становится обратной, что соответствует (481). Итак, истинно гиперболическая ротация Roth Г совершается в базисе ![]() после сферической ротации исходного базиса
после сферической ротации исходного базиса ![]()
В матрице любого псевдодекартового базиса ![]() первые n столбцов задают собственное
первые n столбцов задают собственное ![]() , остальные q столбцов задают собственное
, остальные q столбцов задают собственное
![]() метрического тензора
метрического тензора ![]() в сумме (452). С учётом структуры (473) для матрицы Rot Θ при преобразовании из любого универсального базиса (467) новые собственные подпространства
в сумме (452). С учётом структуры (473) для матрицы Rot Θ при преобразовании из любого универсального базиса (467) новые собственные подпространства задаются тождественно столбцами любой из матриц:
задаются тождественно столбцами любой из матриц: ![]() , Т и Roth Г. Например, из (480) имеем:
, Т и Roth Г. Например, из (480) имеем:
 (482)
(482)
где в квадратных скобках взяты либо первые n, либо остальные q столбцов. В частности, в пространстве Минковского <Рn+1> при преобразовании из универсального базиса новые ![]() и ось
и ось![]()
задаются тождественно столбцами матриц: ![]() , Т и Roth Г. Последняя как элементарная имеет структуру (363), (364). Смысл сказанного состоит в том, что любое тригонометрическое преобразование (460), применительно к собственным евклидовым подпространствам
, Т и Roth Г. Последняя как элементарная имеет структуру (363), (364). Смысл сказанного состоит в том, что любое тригонометрическое преобразование (460), применительно к собственным евклидовым подпространствам ![]() и
и ![]() в целом как множествам точечных элементов, в исходном универсальном базисе сводится к их чисто гиперболической ротации, взятой из представления (474). В частности, это справедливо для оси
в целом как множествам точечных элементов, в исходном универсальном базисе сводится к их чисто гиперболической ротации, взятой из представления (474). В частности, это справедливо для оси ![]() в пространстве Минковского, так как она в целом является собственным подпространством тензора
в пространстве Минковского, так как она в целом является собственным подпространством тензора ![]() Следовательно, используя полярное представление (474), любое сложное тригонометрическое преобразование Т универсального базиса, например многоступенчатое, для собственных подпространств метрического тензора сводится к их чисто гиперболической ротации
Следовательно, используя полярное представление (474), любое сложное тригонометрическое преобразование Т универсального базиса, например многоступенчатое, для собственных подпространств метрического тензора сводится к их чисто гиперболической ротации![]() Напомним,
Напомним,
что матрицы всех псевдодекартовых базисов (которые, в частности, задают собственные подпространства метрического рефлектор-тензора) выражаются в исходном универсальном базисе![]() В универсальных координатных базисах в СТО описываются мировые события (процессы и фиксации) именно с точки зрения относительно неподвижного наблюдателя. Среди них
В универсальных координатных базисах в СТО описываются мировые события (процессы и фиксации) именно с точки зрения относительно неподвижного наблюдателя. Среди них  - простейший по форме исходный базис. В частности, в универсальных базисах реализуется сферическо-гиперболическая аналогия любого конкретного типа, например синус-тангенсная.
- простейший по форме исходный базис. В частности, в универсальных базисах реализуется сферическо-гиперболическая аналогия любого конкретного типа, например синус-тангенсная.
Кроме того, заметим, что при q = 1 матрица  в (473) вырож-
в (473) вырож-
дается в единицу. Поэтому в <Р n+1> непрерывное преобразование Лоренца любой точки на оси ![]() независимо от исходного базиса, сводится к её чисто гиперболической ротации - либо как тензорного точечного объекта (при пассивном преобразовании координат), либо как производящего точечного элемента (при активном преобразовании координат). Дадим два примера, которые представляют интерес в СТО и в гиперболической геометрии, а именно:
независимо от исходного базиса, сводится к её чисто гиперболической ротации - либо как тензорного точечного объекта (при пассивном преобразовании координат), либо как производящего точечного элемента (при активном преобразовании координат). Дадим два примера, которые представляют интерес в СТО и в гиперболической геометрии, а именно:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
