
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (63А)
(63А)
где ![]() - скалярный угол между данными векторами, измеряемый
- скалярный угол между данными векторами, измеряемый
наблюдателем N1. Заметим, что исходная пара векторов и вектор антискорости составляют некоторую тройку векторов в евклидовом пространстве ![]() Согласно неравенству Адамара, для определителя
Согласно неравенству Адамара, для определителя
Грама имеем:
![]() (64А)
(64А)
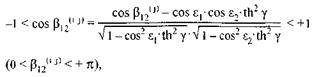
Отсюда следует тригонометрическое неравенство

В данном случае![]() С учётом этого и
С учётом этого и
дополнительного условия th2 γ < 1 неравенство (63А) получает строгое обоснование. Если исходный угол между векторами прямой  то новый угол либо острый
то новый угол либо острый ![]() либо
либо
тупой![]() . Если же
. Если же![]()
Если оба вектора ортогональны вектору антискорости, а следовательно, и сам угол тоже, то в таком случае, конечно, релятивистский эффект изменения угла отсутствует: ![]() Если же один из векторов коллинеарен вектору антискорости, то тогда
Если же один из векторов коллинеарен вектору антискорости, то тогда  уменьшается. При этом тупой угол уменьшается, а острый увеличивается:
уменьшается. При этом тупой угол уменьшается, а острый увеличивается:
![]() (65А) Релятивистская площадь параллелограмма, образуемого движущимися векторами, составляет
(65А) Релятивистская площадь параллелограмма, образуемого движущимися векторами, составляет
 (66А)
(66А)
Диагонали движущегося параллелограмма подвержены лоренцеву сокращению, если при этом они не ортогональны вектору антискорости. В общем случае имеем следующие релятивистские значения для длин диагоналей (первой и второй)-
![]() (67А)
(67А)
Объем параллелепипеда, как и любого другого тела, уменьшается прямо пропорционально секансу гиперболического угла движения. Учтя дополнительно (64А) и (54А), вычисляем синусную норму движущегося трёхмерного линеорного yгла:
![]() (68А)
(68А)
Неравенство нетрудно доказать, выразив ту же синусную норму через (63А) и (64А)

Глава 5А. Тригонометрические модели коллинеарных двух-, многоступенчатых и интегральных движений в СТО и в гиперболической геометрии
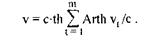
Рассмотрим тригонометрическую интерпретацию суммирования коллинеарных физических движений. В этой главе, как правило, скорости и ускорения фигурируют в скалярной форме. Релятивистский закон сложения скоростей Пуанкаре - Эйнштейна для случая их коллинеарности имеет простую гиперболическую интерпретацию в форме согласованной двухступенчатой ротации (486):
 (69А)
(69А)  (70А)
(70А)
Гиперболическая форма данного закона впервые была установлена Зоммерфельдом с геометрической интерпретацией на сфере мнимого радиуса. В свете вышеизложенного последняя есть гиперболоид II Минковского. По существу это есть правило суммирования тангенсных проекций согласованных гиперболических отрезков. Релятивистский закон сложения нескольких коллинеарных скоростей в тригонометрической форме выражается в многоступенчатой интерпретации в виде:
 (71А)
(71А)
 (72А)
(72А)
Термин "коллинеарность" здесь довольно условен и означает только то, что векторы частных скоростей всегда коллинеарны собственной оси х(1) в пределах одной и той же псевдоплоскости![]() . При этом безразлично, в каких конкретных точках мировой траектории осуществляются элементарные акты суммирования скоростей. Но обязательно то, чтобы сама мировая линия оставалась всегда в пределах этой псевдоплоскости. В частности, скорости могут суммироваться интегрально вдоль мировой линии при движении с ускорением.
. При этом безразлично, в каких конкретных точках мировой траектории осуществляются элементарные акты суммирования скоростей. Но обязательно то, чтобы сама мировая линия оставалась всегда в пределах этой псевдоплоскости. В частности, скорости могут суммироваться интегрально вдоль мировой линии при движении с ускорением.
Аналогично, в пространстве-времени Минковского или Лагранжа прямолинейное физическое движение определяется такой мировой линией, которая располагается в пределах одной и той же псевдоплоскости. Отсюда видна условность термина "прямолинейное движение" для этих пространств событий. Проекция такой криволинейной мировой траектории параллельно любой мгновенной оси собственного времени на собственное евклидово подпространство есть прямая линия со своим направляющим вектором. (В частности, последнее может относиться к универсальному базису ![]()
В тригонометрической версии СТО определяется характеристический гипербочический угол движения γ как угол наклона мировой линии к стреле времени (рис. 2А). Он относителен, как и последняя. Если особо не оговорено, то γ отсчитывается в универсальном базисе относительно![]() Угол движения γ и любые его функции есть относительные инварианты. Для прямой мировой линии относительная скорость между наблюдателями N1 и N2 определяется гиперболическим тангенсом угла движения с двух противоположных точек зрения [рис. 2А (1)]:
Угол движения γ и любые его функции есть относительные инварианты. Для прямой мировой линии относительная скорость между наблюдателями N1 и N2 определяется гиперболическим тангенсом угла движения с двух противоположных точек зрения [рис. 2А (1)]:
 (73А)
(73А)
То же имеет место при прямолинейном физическом движении с ускорением (замедлением). С каждой точкой его мировой линии связан мгновенный псевдодекартов базис с учётом вектора параллельного переноса центра координат в эту точку:
![]() (74А)
(74А)
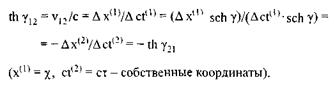
Гиперболический тангенс, определяющий скорость физического движения, выражается двояко - с точек зрения наблюдателей N1 и Nm:
![]() (75А)
(75А)
За собственное (истинное) расстояние χ здесь принимается координата х(1), то есть неподвижная в исходном универсальном базисе ![]()
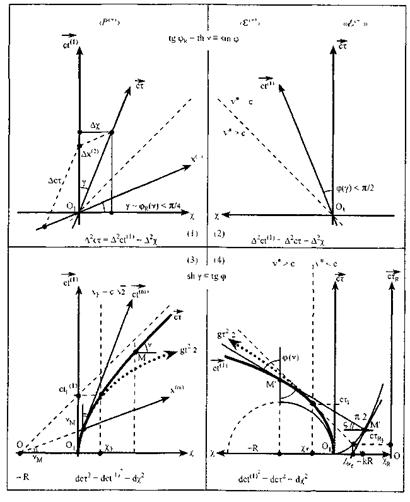
Рис. 2А. Мировые линии материальной точки М для простейших прямолинейных физических движений — равномерного (1, 2) и равномерно ускоренного (3, 4) в универсальном, собственном и сжатом базисах - кинематические параболы).
- кинематические параболы).
За собственное время здесь принимается величина
![]() то есть время, измеренное по хронометру в движущемся объекте или суббазисе
то есть время, измеренное по хронометру в движущемся объекте или суббазисе ![]()
Криволинейная мировая траектория тождественна криволинейной
стреле собственного времени ![]() [рис. 2А (3)] для движущегося объекта. Её направленная касательная
[рис. 2А (3)] для движущегося объекта. Её направленная касательная ![]() вместе с тем, есть мгновенная стрела собственного времени. В формулах (73А), (75А) при вычислении относительной скорости наблюдателей N2 или Nm используется движущаяся координата х(2) или х(m), которая в
вместе с тем, есть мгновенная стрела собственного времени. В формулах (73А), (75А) при вычислении относительной скорости наблюдателей N2 или Nm используется движущаяся координата х(2) или х(m), которая в ![]() релятивистски сокращена в сравнении с собственной координатой χ = х(1). Аналогично, при измерении той же скорости v наблюдателем N1 используется координатное время t(1), которое здесь релятивистски увеличено в сравнении со временем τ. Поэтому вычисляемая скорость v по существу координатная. С другой стороны, собственная скорость физического движения (39А) определяется с использованием только собственных координат, а тригонометрически - через соответствующий относительный синусный инвариант:
релятивистски сокращена в сравнении с собственной координатой χ = х(1). Аналогично, при измерении той же скорости v наблюдателем N1 используется координатное время t(1), которое здесь релятивистски увеличено в сравнении со временем τ. Поэтому вычисляемая скорость v по существу координатная. С другой стороны, собственная скорость физического движения (39А) определяется с использованием только собственных координат, а тригонометрически - через соответствующий относительный синусный инвариант:
![]() (76А)
(76А)
Закон сложения коллинеарных собственных скоростей имеет синусную интерпретацию (хотя гиперболические углы суммируются точно также, как и ранее):
 (77А)
(77А)
что эквивалентно соотношению![]()
Векторы v*, sh γ имеют те же направляющие косинусы, что и векторы v, th γ, так как они получаются из одного и того же векторного параметра dx в числителе дроби
Заметим также, что в формуле (75А) производная ![]() задаёт
задаёт
скорость удаления N1 от Nm, где dx(m) < 0. Совершенно другой смысл имеет производная![]() когда ускорение движения рассматривается
когда ускорение движения рассматривается
с точки зрения мгновенной системы![]() Тогда в её мгновенном начале координат М скорость (производная) нулевая. Поэтому определим в окрестности точки М криволинейной плоской мировой траектории два гиперболических угла, а именно
Тогда в её мгновенном начале координат М скорость (производная) нулевая. Поэтому определим в окрестности точки М криволинейной плоской мировой траектории два гиперболических угла, а именно ![]() - общий угол движения в системе
- общий угол движения в системе![]() - дополнительный угол движения в системе
- дополнительный угол движения в системе![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
