
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (177А), (178А)
(177А), (178А)
Здесь используется абстрактная аналогия типа (323), когда осуществляется трансформация:
![]()
Матрица основной сферической ротации rot Ф (то есть ротации с реперной осью), согласно (314), имеет каноническую структуру в ![]() отвечающую рефлектор-тензору как указано ниже:
отвечающую рефлектор-тензору как указано ниже:
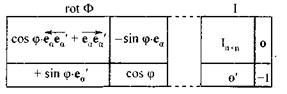 (179 А)
(179 А)
С другой стороны, ортогональная матрица rot Θ в базисе своего действия, согласно (497), отвечает рефлектор-тензору по схеме (110А). В связи с вышеуказанной аналогией в исходных универсальных базисах формулы гиперболической геометрии (гл. 7А) весьма логично преобразуются в формулы сферической геометрии. Если перейти от угла движения к мере Ламберта - гиперболической и сферической
 (180)
(180)
то обе геометрии (в малом) также переходят друг в друга во внутренней и внешней интерпретациях. Поэтому далее приводится, главным образом, сводка формул движений в сферической геометрии с небольшими пояснениями. Заметим, что движения в сферической геометрии и в эллиптической геометрии Римана в достаточно ограниченной области изоморфны в силу изоморфности этих геометрий в малом. Поэтому конечные результаты в скалярной форме, относящиеся только к внутренней геометрии, имеют место в обеих геометриях.
Для двухступенчатого неколлинеарного движения по гиперсфероиду в <Qn+> имеем:
 (181А)
(181А)
- аналог формулы (111 А);
![]() (182А)
(182А)
— аналог формулы (112А);
![]() (183А)
(183А)  (184А)
(184А)
— аналоги формул (114 А), (115 А), где корни тригонометрические.
В случае при перемене порядка последовательности двух
при перемене порядка последовательности двух
сферических движений на противоположный новый квазидекартов базис задаёт матрица - квазианалог Т' из (116 А):
 (185А)
(185А)
Формально преобразование Т* выводится из Т через операцию простого транспонирования, но при этом реализуемой в бинарном комплексном базисе (443). Для обратного порядка движений имеем:
![]() (186 А)
(186 А)
![]() (187 А)
(187 А)
- аналоги формул (117А), (118А), где корни тригонометрические.
Здесь также сохраняется двойственность во взгляде на ротацию rot Θ. С одной стороны, она связана с возникающим сферическим сдвигом при суммировании частных неколлинеарных движений неточечных объектов. С другой стороны, согласно (112А), она же преобразует модально основную суммарную ротацию rot Ф при перемене порядка последовательности двух частных движений на противоположный. Связь между двумя вариантами двухступенчатого сферического движения (прямым и обратным) сводится к замене частных углов по схеме:
![]() (188 А)
(188 А)
— аналог (121 А).
Перемножая элементы матриц в (183А) или применяя аналогию абстрактного типа, получаем формулы двухступенчатого движения в <Qn+1>. Например, в косинусной интерпретации имеем:
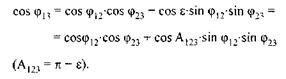 (189 А)
(189 А)
Отсюда непосредственно видна независимость суммарного скалярного угла движения от порядка последовательности двух частных движений. Это классическая скалярная формула сферической геометрии и эллиптической геометрии Римана. При движении по гиперсфероиду с возрастанием значений направленной ординаты![]() все φ > 0. В связи с этим обстоятельством для положительных углов движения φ (и расстояний по метрике Ламберта) с учётом (189А) следует правило "параллелограмма", как в евклидовой геометрии:
все φ > 0. В связи с этим обстоятельством для положительных углов движения φ (и расстояний по метрике Ламберта) с учётом (189А) следует правило "параллелограмма", как в евклидовой геометрии:
![]() (190А)
(190А)
- аналог (123А). Неравенства (190А) и φ > 0 относят расстояние в сферической геометрии в категорию норм. Заметим, что в тангенсной модели, или в проективной модели Клейна гиперсфероид в целом отображается на всю двухстороннюю (замкнутую) проективную гиперплоскость ![]() , то есть он гомеоморфен ей.
, то есть он гомеоморфен ей.
Соответствующие формулы для скалярных синуса и тангенса - аналоги (124А) и (125А) даются с учётом теоремы о приведении к биортогональной (квадратичной) некоммутативной форме (гл. 7А):
![]() (191А)
(191А)  (192 А)
(192 А)
Для условно ортогональных частных движений из (189А) следует мультипликативная косинусная формула, трактующая скалярно их суммирование как интегральный аналог теоремы Пифагора:
![]() (193А)
(193А)
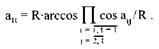
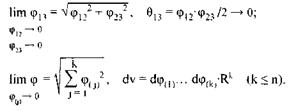
При движении по n-мерному гиперсфероиду количество последовательных независимых, условно ортогональных отрезков (углов) не может превышать число «n». Применяя также последовательно (193А), получаем общую мультипликативную косинусную формулу

Суммирование условно ортогональных движений в <Qn+1> в скалярном варианте коммутативно. Например, протяжённость суммы таких движений вычисляется в виде
Кроме того, многозвенные косинусные формулы для условно ортогональных движений в обеих геометриях представляются в аддитивной форме через логарифмические меры:
![]()
Общие мультипликативные и аддитивные соотношения для скалярной суммы условно ортогональных движений являются интегральными аналогами теоремы Пифагора в неевклидовой геометрии.
Как и ранее, особый случай соответствует ортогональной (теперь не условно!) сумме бесконечно малых частных углов движения:
Здесь имеет место коммутативность частных углов движения в скалярной и векторной формах. Например, первый дифференциал общего угла движения представляется в двух вариантах - аналогах (144А) и (145А):
![]() (194 А)
(194 А) 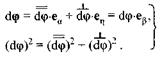 (195А)
(195А)
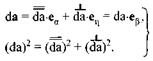
Ввиду того, что при непрерывных движениях в <Рn+1> или в <Q n+1>, отображамых непосредственно траекториями на собственных гиперповерхностях, характеристический радиус постоянен (R = const), то аналогичная инфинитиземальная теорема Пифагора имеет место для соответствующих дифференциалов длин ортогональных приращений отрезков, выраженных мерой Ламберта. В первом варианте имеем:
![]() (196А)
(196А)
Например, это может быть первая каноническая квадратичная форма римановой поверхности постоянной кривизны, выраженная в текущих ортогональных криволинейных координатах Гаусса. Во втором варианте имеем:
 (197А)
(197А)
Например, это может быть разложение первого дифференциала
![]() на тангенциальную и нормальную ортопроекции в соприкасающейся псевдо/квазиплоскости к криволинейному участку линии движения в окрестности точки М с мгновенным радиусом псевдо/квазикривизны R(m).
на тангенциальную и нормальную ортопроекции в соприкасающейся псевдо/квазиплоскости к криволинейному участку линии движения в окрестности точки М с мгновенным радиусом псевдо/квазикривизны R(m).
С другой стороны, во внешней тригонометрии гиперсфероида в <Q n+1> имеют место векторные формулы для синуса и тангенса суммы двух движений:
 (198А)
(198А)
 - аналоги формул (135А) и (138А) с той же геометрической интерпретацией, но в сферическом варианте.
- аналоги формул (135А) и (138А) с той же геометрической интерпретацией, но в сферическом варианте.
Далее рассмотрим внешнюю векторную тригонометрию единичного гиперсфероида (R = 1).
* * *
Имеем:
 (200А)
(200А)
- n×1 единичный радиус-вектор точки гиперсфероида. Метрический инвариант выражается в виде:
 (201 А)
(201 А)
Остальные тригонометрические функции получаются делением базового элемента е либо на cos φ, либо на sin φ. Далее,
 радиус-вектор секанса, конец которого лежит на тангенсной евклидовой гиперплоскости;
радиус-вектор секанса, конец которого лежит на тангенсной евклидовой гиперплоскости;
 радиус-вектор косеканса, конец которого лежит на котангенсной цилиндрической евклидовой гиперповерхности.
радиус-вектор косеканса, конец которого лежит на котангенсной цилиндрической евклидовой гиперповерхности.
Сферическое преобразование (движение) какого-либо точечного элемента![]() единичного гиперсфероида в активной форме в
единичного гиперсфероида в активной форме в ![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
