
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
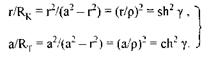
Исходные параметры «а» и «r» однозначно задают постоянный гиперболический угол движения
![]()
Осуществляя ортогональное дифференцирование (223А) и (233А) в указанных цилиндрических координатах, получаем формулы для кривизны и кручения, а также их тригонометрическую взаимосвязь:
 (242А)
(242А)
С учётом того, что ![]() отсюда вытекают соотношения:
отсюда вытекают соотношения:
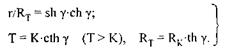 (243 А)
(243 А)
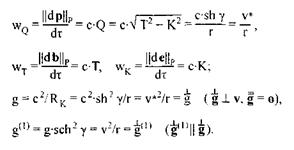
Полная кривизна ротации псевдонормали как 4-вектор направлена параллельно базовому ![]() и строго к оси винта
и строго к оси винта ![]() Угловые скорости
Угловые скорости
и внутренние ускорения выражаются в виде:
В каждой точке М псевдовинта соприкасающаяся псевдоплоскость  рассекает объемлющий цилиндр по мгновенному касательному эллипсу. В его перигее (точке М) радиусы касательных окружности и гиперболы совпадают. Следовательно, нормаль и псевдонормаль к псевдовинтовой мировой линии одинаковы (n = р).
рассекает объемлющий цилиндр по мгновенному касательному эллипсу. В его перигее (точке М) радиусы касательных окружности и гиперболы совпадают. Следовательно, нормаль и псевдонормаль к псевдовинтовой мировой линии одинаковы (n = р).
В подвижном трёхграннике Френе![]() 4-вектор
4-вектор
псевдонормали р(сτ), как и k(сτ), направлен перпендикулярно к базовой оси ![]() 4-вектор бинормали b(сτ), как и t(сτ), направлен тангенциально к окружности радиуса r планетарного физического движения в базовом
4-вектор бинормали b(сτ), как и t(сτ), направлен тангенциально к окружности радиуса r планетарного физического движения в базовом ![]() то есть вдоль вектора скорости v, но в противоположном ему направлении; 4-вектор единичной касательной i(сτ), как и с(сτ), направлен по мировой линии, то есть по
то есть вдоль вектора скорости v, но в противоположном ему направлении; 4-вектор единичной касательной i(сτ), как и с(сτ), направлен по мировой линии, то есть по ![]() В силу этого р(сτ) и i(сτ) совместно сферически и гиперболически ортогональны друг другу (см. формулу (240А)).
В силу этого р(сτ) и i(сτ) совместно сферически и гиперболически ортогональны друг другу (см. формулу (240А)).
Изложенная абсолютная трактовка, в принципе, обобщается для псевдовинтового движения, проекцией которого является обычное эллиптическое планетарное физическое движение.
* * *
В самом же общем случае для мировой линии в <Р3+1> λ = 4 = max. Тогда бинормаль b(сτ) как единичный вектор подвергается общей сферической ротации в ![]() псевдоортогонально дополнительном
псевдоортогонально дополнительном
к i(сτ), но с двумя степенями свободы в силу её перманентной сферической ортогональности к псевдонормали. Формально вторая степень свободы вызвана ротацией плоскости кручения  в
в![]() или её ортопрецессией Z(сτ). При 4-ом дифференцировании вдоль мировой линии после (222А), (223А) и (233А) общая сферическая ротация бинормали разлагается на две сферические составляющие, ортогональные друг другу. В результате имеем третью формулу:
или её ортопрецессией Z(сτ). При 4-ом дифференцировании вдоль мировой линии после (222А), (223А) и (233А) общая сферическая ротация бинормали разлагается на две сферические составляющие, ортогональные друг другу. В результате имеем третью формулу:
![]() (244А)
(244А)
Здесь первая часть сферической ротации бинормали синхронна со сферической частью общей ротации псевдонормали в формуле (233А). Обе ротации происходят в плоскости![]() Вторая часть
Вторая часть
сферической ротации бинормали осуществляется в мгновенной абсолютной плоскости ортопрецессии бинормали вокруг
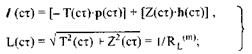
мгновенной псевдонормали р(сτ) (Как и ранее, здесь используется взаимная ортогональность единичного вектора-функции и его вектора-дифференциала любого порядка.) Единичный 4-вектор тринормали h(сτ) является однозначным (при λ=4=max) ортогональным дополнением в  Наиболее общо он определяется также однозначно как псевдоортогональное дополнение в базовом псевдоевклидовом пространстве-времени <Р3+1> к тройке единичных орт-векторов - псевдонормали, бинормали и касательной:
Наиболее общо он определяется также однозначно как псевдоортогональное дополнение в базовом псевдоевклидовом пространстве-времени <Р3+1> к тройке единичных орт-векторов - псевдонормали, бинормали и касательной:
 (245А)
(245А)
Тринормаль h(сτ) в плоскости ортопрецессии бинормали b(сτ) перманентно сферически ортогональна ей. При заключительном 5-ом дифференцировании вдоль мировой линии после (222А), (223 А), (233 А) и (244А) имеем четвертую формулу:
![]() (246А)
(246А)
Это соотношение вытекает из очевидного условия, что формально последующий и последний в получаемой серии абсолютный дифференциально-геометрический параметр пятого порядка при λ = 4 является обязательно нулевым (то есть их цепь обрывается). Она, конечно, также имеет свой вещественный аналог для регулярных кривых, вложенных в евклидово пространство ![]() и т. д.
и т. д.
В последовательности![]() эти
эти
единичные векторы задают полный абсолютный 4-х ортовый мгновенный псевдодекартов базис в <Р3+1>. Здесь они, по определению, составляют правую четвёрку базисных векторов, или мгновенный псевдоортогональный репер. (Ортопрецессия бинормали в окрестности точки М мировой линии совершается в ![]() как для правого винта
как для правого винта
в абсолютном 3-х ортовом суббазисе![]() при положительном значении величины L.) В указанном случае правая четвёрка базисных векторов
при положительном значении величины L.) В указанном случае правая четвёрка базисных векторов задаёт
задаёт
характеристический подвижный четырехгранник в <Р3+1>.
Абсолютная мгновенная угловая скорость сферической ортопрецессии бинормали и вместе с тем сферической ротации тринормали в плоскости ![]() выражается в виде:
выражается в виде:
![]() (247А)
(247А)
где ![]() — мгновенное внутреннее ускорение ортопрецессии
— мгновенное внутреннее ускорение ортопрецессии
бинормали и ротации тринормали. Как 4-вектор оно направлено по мгновенному вектору тринормали:
![]() (248А)
(248А)
Абсолютная полная сферическая кривизна для общей сферической ротации бинормали b(сτ) в векторной и скалярной формах определяется из (244А) в виде:
 (249А)
(249А)
![]() (250А)
(250А)
Здесь gL(m)=gL(сτ) - мгновенное внутреннее ускорение общей
сферической ротации бинормали (брутто-параметр). Как 4-вектор оно направлено по соответствующему суммарному вектору полной кривизны ротации бинормали l(сτ).
В свою очередь, тринормаль h (сτ), согласно (246А), подвергается сферической ротации в плоскости синхронно со второй
синхронно со второй
частью сферической ротации бинормали. Эта часть ротации b(сτ) как единичного вектора имеет сферичискую кривизну Z (радиус кривизны Rz = 1/Z ) и направляющий орт h (сτ) - вектор тринормали. Поэтому ортопрецессию можно также определить как кривизну третьего порядка. В РТГ в базовом пространстве-времени Минковского это есть максимальный порядок абсолютной кривизны мировой линии. В ОТО в произвольном псевдоримановом пространстве-времени тот же порядок абсолютной кривизны мировой линии был бы не ограничен сверху в силу неопределённости размерности объемлющего его псевдоевклидова пространства.
Таким образом, в данной заключительной главе, с применением средств тензорной тригонометрии, была изложена геометрическая трактовка абсолютного движения материальной точки под действием активных сил любой природы, в том числе гравитационных, как если бы оно происходило, согласно РТГ, в пространстве-времени Минковского и отображалось наблюдателем в каком-либо его универсальном базисе без искажения пространственно-временной гравитационной линзой, разделяющей материальную точку и данного наблюдателя. В частности, именно такое описание абсолютного движения должно иметь место в локальной окрестности этого пространства-времени, где проходит мировая линия указанной материальной точки.
Литература
1. Александров аналитической геометрии и линейной алгебры. - М.: Наука, 1979.
2. Архангельский векторные пространства. - М.: Физматгиз, 1982.
3. Неравенства: Пер. с англ. - М.: Мир, 1965.
4. Беклемишев аналитической геометрии и линейной алгебры. - М.: Физматгиз, 2003.
5. РейнаЧ. Прецессия Томаса. Подход Зоммерфельда: Пер. с англ. // Эйнштейновский сборник 1984 - 85. - М.: Наука, 1988, с. 201 -214.
В оригинале: Belloni L., Reina С. Sommerfeld's way to the Thomas precession // Europ. J. Phys. - 1986, v. 7, p. 55 - 61.
6. , Минаков линзы. - Киев: Наукова Думка, 1989.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
