
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
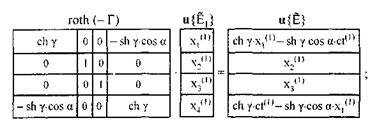
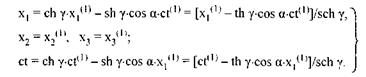
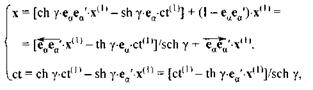
Одна и та же стрела времени![]() или прямая мировая линия как в верхней, так и в нижней полости изотропного конуса определяется одной и той же матрицей roth Г. Это физически соответствует одному и тому же вектору скорости, а геометрически выражается как движение:
или прямая мировая линия как в верхней, так и в нижней полости изотропного конуса определяется одной и той же матрицей roth Г. Это физически соответствует одному и тому же вектору скорости, а геометрически выражается как движение:
![]() (22А)
(22А)
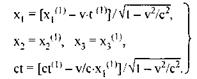
(Последнее выражение дано для антиподной гиперболической геометрии.) С другой стороны, симметричная ей относительно![]() стрела времени или прямая мировая линия определяется обратной матрицей. Это физически соответствует аддитивно противоположному вектору скорости, а геометрически выражается как движение:
стрела времени или прямая мировая линия определяется обратной матрицей. Это физически соответствует аддитивно противоположному вектору скорости, а геометрически выражается как движение:
![]() (23 А)
(23 А)
(Последнее выражение дано для антиподной гиперболической геометрии.) Обратим внимание на то, что в обоих равенствах формально значение γ положительно для направления материального движения по стреле времени и отрицательно для направления мысленного движения против стрелы времени (то есть в данном случае реперной оси для отсчёта угла ротации). Из (21 А) следует, что в <Р1+1> координатная скорость физического движения в ![]() выражается
выражается
тригонометрическим способом через соотношение:
![]() (24А)
(24А)
где ![]() В самом же общем случае вектор скорости характеризу-
В самом же общем случае вектор скорости характеризу-
ется модулем ![]() и направляющими косинусами: cos α1, cosα 2 и cos α3. Его три ортопроекции в тригонометрической форме имеют вид:
и направляющими косинусами: cos α1, cosα 2 и cos α3. Его три ортопроекции в тригонометрической форме имеют вид:
![]() (25А)
(25А)
где ![]()
При описании физического движения со скоростью v в псевдоплоскости ротации <Р1+1> в координатах  новые координатные оси х и
новые координатные оси х и ![]() отклоняются на один и тот же гиперболический угол
отклоняются на один и тот же гиперболический угол  В универсальном базисе имеет место сферическо-гиперболическая аналогия конкретного типа, например тангенс-тангенсная или синус-тангенсная:
В универсальном базисе имеет место сферическо-гиперболическая аналогия конкретного типа, например тангенс-тангенсная или синус-тангенсная:
![]()
То есть при указанной формализации простых физических движений относительно неподвижного наблюдателя, в принципе, безразлично какую тригонометрию применять для описания — гиперболическую или сферическую. Но при формализации комбинированных физических движений, например, таковых относительно подвижного наблюдателя, многоступенчатых и интегральных движений применяется только первая. То же относится к основным движениям в гиперболической геометрии - простым и многоступечатым.
Так, например, сферический угол параллельности Лобачевского П (a/R), широко используемый в гиперболической неевклидовой геометрии как угловой аргумент, имеет геометрический смысл исключительно в универсальном базисе и для простых движений в отличие от гиперболического угла-аргумента γ = a/R, определяемого корректно внешним образом в любом псевдодекартовом базисе:
 (26А)
(26А)
где ![]() согласно (331), (356). При
согласно (331), (356). При
движении по геодезической (гиперболе) из центра гиперболоида II угол параллельности Лобачевского, выраженный в универсальном базисе, уменьшается от π/2 до П (γ).
В заключение данной вводной главы отметим, что изначальный математический подход Пуанкаре является исчерпывающим для логически безупречного построения СТО. С другой стороны, изначальный физический подход Эйнштейна к этому на основе известных двух постулатов таким свойством не обладает - равно как только из экстремума ![]() в любых системах отсчёта и математического принципа относительности невозможно построить гиперболическую тригонометрию. Исходя только из последних двух положений (эквивалентных постулатам Эйнштейна), в принципе, можно построить логически безупречным образом бесконечное множество тригонометрии (геометрий постоянного радиуса R) и их квазифизических изоморфизмов с псевдогёльдеровой (неквадратичной при р≠ 2) метрикой:
в любых системах отсчёта и математического принципа относительности невозможно построить гиперболическую тригонометрию. Исходя только из последних двух положений (эквивалентных постулатам Эйнштейна), в принципе, можно построить логически безупречным образом бесконечное множество тригонометрии (геометрий постоянного радиуса R) и их квазифизических изоморфизмов с псевдогёльдеровой (неквадратичной при р≠ 2) метрикой:
![]()
Задание именно псевдоевклидовой метрики (р = 2) было осуществлено Эйнштейном неявным образом при аксиоматическом определении им же понятия одновременности. (Определение одновременности по Эйнштейну есть теорема геометрии Минковского - см. в гл. 4А.)
Глава 2А. Тензорная тригонометрическая модель однородных преобразований Лоренца
В пространстве-времени Минковского исходные и новые координаты мировой точки в инерциальных системах![]() согласно (21 А), или
согласно (21 А), или
в четырёхмерной форме как в![]() в той же псевдоплоскости ротации
в той же псевдоплоскости ротации
связаны пассивным модальным ротационным преобразованием гиперболического типа:
 (27А)
(27А)
(Тригонометрические однородные преобразования координат пространства и времени Пуанкаре — Минковского.) Здесь дополнительно используется множитель cos α = ± 1, определяющий направление вектора тангенса. С учётом (24А) они же приобретают физическую форму однородных преобразований координат Лоренца:
Используя гиперболическую ротационную модальную матрицу с общей канонической структурой (363) в ![]() получаем генеральные тригонометрические преобразования координат в четырёхмерной форме (к = 1,2, 3):
получаем генеральные тригонометрические преобразования координат в четырёхмерной форме (к = 1,2, 3):
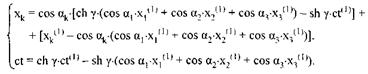 (28А)
(28А)
Те же тригонометрические преобразования в векторной форме:
 (29А)
(29А)
где ![]() - вектор направляющих косинусов скорости движения
- вектор направляющих косинусов скорости движения
или вектора тангенса;

Генеральные тригонометрические преобразования координат (29А), если использовать сравнение с (27А), трактуются так. Во первых, пространственная проекция х(1) в ![]() представляется прямой суммой из релятивистской и нерелятивистской составляющей — параллельной и сферически ортогональной вектору
представляется прямой суммой из релятивистской и нерелятивистской составляющей — параллельной и сферически ортогональной вектору Во вторых, при гиперболической ротации базиса
Во вторых, при гиперболической ротации базиса![]() в псевдоплоскости
в псевдоплоскости ![]() пассивному модальному преобразованию подвергаются только временная проекция ct(1) и релятивистская составляющая пространственной проекции
пассивному модальному преобразованию подвергаются только временная проекция ct(1) и релятивистская составляющая пространственной проекции![]() Ортогональная составляющая
Ортогональная составляющая
![]() есть инвариант преобразований Лоренца и Галилея. Далее,
есть инвариант преобразований Лоренца и Галилея. Далее,
![]()
(при физическом движении γ > 0),
![]() (30А)
(30А)
где γk - частный гиперболический угол между![]() и проекцией
и проекцией![]() на координатную псевдоплоскостъ
на координатную псевдоплоскостъ![]() Заметим тут же, что
Заметим тут же, что
любые тензоры с нулевой четвёртой координатой в псевдодекартовых базисах в <Р3+1>, в том числе векторы тангенса и скорости физического движения, подчиняются формулам евклидовой геометрии в собственном ![]() в частности, их модули и проекции удовлетворяют теореме Пифагора. Аналогичные генеральные преобразования координат пространства-времени в физической форме имеют вид:
в частности, их модули и проекции удовлетворяют теореме Пифагора. Аналогичные генеральные преобразования координат пространства-времени в физической форме имеют вид: 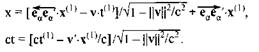
Преобразования координат в четырёхмерной физической форме вывел Герглотц, используя разложение х(1) в![]() на релятивистскую и нерелятивистскую ортопроекции (принцип Герглотца).
на релятивистскую и нерелятивистскую ортопроекции (принцип Герглотца).
Во всех вышеуказанных преобразованиях координат мировой точки применяется два вида базиса:![]() Первый из них входит во множество универсальных базисов (16А). Понятие универсальный оазис, очевидно, относительно. Оно привязано к конкретному наблюдателю, например, к N1 в системе
Первый из них входит во множество универсальных базисов (16А). Понятие универсальный оазис, очевидно, относительно. Оно привязано к конкретному наблюдателю, например, к N1 в системе ![]() Напомним, что именно в
Напомним, что именно в ![]() как правило, выражаются матрицы других псевдодекартовых базисов. Концепция универсального базиса позволяет установить отношение наблюдателя N1 к любому другому псевдодекартову базису
как правило, выражаются матрицы других псевдодекартовых базисов. Концепция универсального базиса позволяет установить отношение наблюдателя N1 к любому другому псевдодекартову базису![]() При этом возможны 3 варианта:
При этом возможны 3 варианта:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
