
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рассматриваемый времениподобный феномен — отрезок мировой линии, согласно (32А) и (37А), в базисе ![]() имеет ещё проекцию на
имеет ещё проекцию на ![]() - пространственный путь объекта, выражаемый как через координатное, так и через собственное время:
- пространственный путь объекта, выражаемый как через координатное, так и через собственное время:
![]()
Кинематическая характеристика v* определяется здесь как собственная скорость физического движения
![]() (39А)
(39А)
Все четыре вектора:![]() — коллинеарны. Связь между
— коллинеарны. Связь между
проекциями гиперболического угла γk из (30А) и γk' из (35А) видна из соотношений:
![]()
В псевдоплоскости гиперболической ротации рассматриваемая задача сводится к решению плоского "внутреннего'" гиперболически прямоугольного треугольника, в котором ∆cτ - гипотенуза «g», ∆l(1) - катет «а» и ∆ct(1) - катет «b» (см. рис. 1 А).
Заметим, что в произведениях (32А), (37А) ротационная гиперболическая матрица действует формально в усечённом виде, а именно только своей нижней строкой. Вызвано это тем, что исходный линейный элемент параллелен собственной стреле времени. Очевидно, что для использования матрицы в полном виде исходный линейный элемент должен образовывать некоторый угол γ со стрелой времени ![]() Это может иметь место, например, при анализе двух - и многоступенчатых движений (см. далее в гл. 5А и 7А). Тем же тригонометрическим способом устанавливается ещё одна существенная теорема СТО и геометрии Минковского. Она формулируется так: "Из всех мировых линий, соединяющих непрерывно точки М' и М" в <Р3+1> , прямолинейный отрезок М'М" имеет максимально возможную псевдоевклидову длину (или собственное время)".
Это может иметь место, например, при анализе двух - и многоступенчатых движений (см. далее в гл. 5А и 7А). Тем же тригонометрическим способом устанавливается ещё одна существенная теорема СТО и геометрии Минковского. Она формулируется так: "Из всех мировых линий, соединяющих непрерывно точки М' и М" в <Р3+1> , прямолинейный отрезок М'М" имеет максимально возможную псевдоевклидову длину (или собственное время)".
![]()
С другой стороны, минимальная (нулевая) длина таковой непрерывной мировой линии имеет место при соединении точек М' и М" световыми отрезками (при условии γ = + со). При этом всегда достаточно двух таких отрезков.
Глава 4А. Лоренцево сокращение протяжённости как следствие деформационного гиперболического преобразования
Во внешней полости изотропного конуса (рис. 1 А) рассматриваются совокупности мировых точек, для которых все межточечные интервалы вещественные, или пространствуподобные. Это тождественно тому, что все мировые точки в данной совокупности принадлежат некоторому евклидову подпространству ![]() В соответствующем ему базисе
В соответствующем ему базисе![]() все эти точки имеют одну и ту же временную координату на стреле времени
все эти точки имеют одну и ту же временную координату на стреле времени ![]() Этот пространствуподобный феномен есть мировая фиксация некоторого геометрического объекта (как множества точек евклидова подпространства) в <Р3+1>. Мировая фиксация графическим способом задаёт понятие одновременности множества мировых точек в конкретном базисе
Этот пространствуподобный феномен есть мировая фиксация некоторого геометрического объекта (как множества точек евклидова подпространства) в <Р3+1>. Мировая фиксация графическим способом задаёт понятие одновременности множества мировых точек в конкретном базисе ![]() с условием возможности её реализации для них. С другой стороны, все мировые точки из данной совокупности принадлежат своим мировым линиям в <Р3+1>. Для геометрического объекта евклидова подпространства, совершающего поступательное физическое движение, мировые линии всех его точек параллельны, что соответствует по направлению собственной стреле времени
с условием возможности её реализации для них. С другой стороны, все мировые точки из данной совокупности принадлежат своим мировым линиям в <Р3+1>. Для геометрического объекта евклидова подпространства, совершающего поступательное физическое движение, мировые линии всех его точек параллельны, что соответствует по направлению собственной стреле времени ![]() .
.
Подпространства ![]() гиперболически ортогональны тогда
гиперболически ортогональны тогда
и только тогда, когда геометрический объект находится в состоянии физического покоя в первом из них. В этом случае вышеуказанные индексы совпадают, а мировая фиксация объекта определяется как собственная.
С математической точки зрения эйнштейново (физическое) определение одновременности, применительно к пространству событий Минковского, является изящной геометрической теоремой в <Р3+1>. В двумерной трактовке: "В треугольнике ABC (рис.1 А), образованном пространствуподобным отрезком АВ и парой встречных световых отрезков АС и ВС, медиана и высота, опущенные из вершины С, тождественны". Следствие: "В вышеуказанном треугольнике ABC основание и медиана принадлежат к двум одноиндексным собственным направлениям данной псевдоплоскости, то есть они гиперболически ортогональны". В более общей четырёхмерной трактовке: "В конусе, получаемом любым эллиптическим сечением изотропного конуса, медиана, опущенная из вершины С, и её трёхмерное основание гиперболически ортогональны. И обратно: высота, опущенная из вершины С, есть медиана". Одновременность мировой фиксации как относительное понятие определяется по отношению или к какому-либо ![]() (параллельность ему), или к какой-либо
(параллельность ему), или к какой-либо![]() (гиперболическая ортогональность ей).
(гиперболическая ортогональность ей).
Собственная мировая фиксация тождественна самому геометрическому объекту в состоянии физического покоя. Произвольная мировая фиксация, по определению, есть одновременный срез мировой траектории геометрического объекта в некотором заданном псевдодекартовом базисе ![]() Если геометрический объект физически покоится в
Если геометрический объект физически покоится в ![]() его мировая траектория в пространстве Минковского
его мировая траектория в пространстве Минковского
параллельна стреле времени![]() Тогда нахождение мировой фикса-
Тогда нахождение мировой фикса-
ции объекта в![]() сводится к его аффинному проецированию на
сводится к его аффинному проецированию на![]() параллельно
параллельно![]() то есть к его проецированию в перекрёстном базисе
то есть к его проецированию в перекрёстном базисе  . Перекрёстное проецирование в данном случае описывается формально гиперболическим деформационным преобразованием, действующим в той же псевдоплоскости, что и ротация. Но теперь она имеет свойства квазиевклидовой плоскости, так как при данном деформационном преобразовании в ней действует квазиевклидов инвариант, или перекрёстный евклидов инвариант. Геометрический объём мировой фиксации объекта имеет максимальное значение именно для собственной характеристики:
. Перекрёстное проецирование в данном случае описывается формально гиперболическим деформационным преобразованием, действующим в той же псевдоплоскости, что и ротация. Но теперь она имеет свойства квазиевклидовой плоскости, так как при данном деформационном преобразовании в ней действует квазиевклидов инвариант, или перекрёстный евклидов инвариант. Геометрический объём мировой фиксации объекта имеет максимальное значение именно для собственной характеристики:
![]() (40А)
(40А)
В зависимости от размерности геометрического объекта, как хорошо известно, возможны четыре варианта его мировой траектории: линия для объекта размерности 0 (точка); полоса для объекта размерности 1 (стержень); трёх - или четырёхмерный брус для объектов размерности 2 (треугольник, параллелограмм) или 3 (тетраэдр, параллелепипед). Здесь используются простейшие геометрические объекты, сводимые математически к линеорам. Множество всех мировых фиксаций данного объекта тождественно множеству всех пространствуподобных сечений его мировой траектории. В частности, относительно неподвижный наблюдатель N1 фиксирует стержень одновременно как проекцию на ![]() параллельно
параллельно ![]() (рис.1А).
(рис.1А).
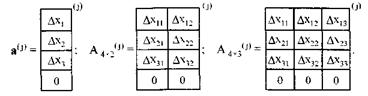
Мировые фиксации, как и мировые линии, или траектории, - тензорные понятия валентности 1. Для вышеуказанных простейших геометрических объектов мировая фиксация выражается либо как 4×1-вектор, либо как 4×2-линеор, либо как 4×3-линеор в зависимости от размерности. Если объект физически покоится в ![]() то в
то в![]() определяется его собственная мировая фиксация. В базисе
определяется его собственная мировая фиксация. В базисе![]() объекты размерности 1, 2 и 3, приложенные в некоторой мировой точке, выражаются как элементы линейного пространства Минковского.
объекты размерности 1, 2 и 3, приложенные в некоторой мировой точке, выражаются как элементы линейного пространства Минковского.
 (41А)
(41А)
В комбинированном перекрёстном базисе![]() они те же:
они те же:
![]() (42А)
(42А)
При деформационных модальных преобразованиях координат этих тензоров в другой перекрёстный базис ![]() действует квазиевклидов метрический инвариант:
действует квазиевклидов метрический инвариант:
![]() (43А)
(43А)  (44А)
(44А)
Этот инвариант схож с евклидовым ввиду имеющейся в ![]() сферическо-гиперболической аналогии конкретного типа:
сферическо-гиперболической аналогии конкретного типа:
![]() (45А)
(45А)
Поскольку при определении мировой фиксации применяется перекрёстное проецирование, то для нахождения новых координат тензоров используется деформационная матрица с тем же гиперболическим углом, но обратная по отношению к модальной матрице, связывающей перекрёстные базисы:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
