
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
гональном базисе {Rw} эта же модальная матрица выражается как
![]() (309)
(309)
где в фигурных скобках дана ротационная матрица в вышеуказанной W-форме. В свою очередь, собственным подпространствам <im B> и <ker B> соответствуют системы ортогональных собственных вектор-столбцов этой же модальной матрицы:
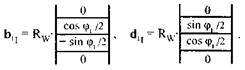
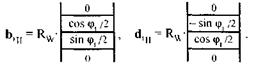
Аналогичным образом устанавливается модальная матрица из вектор-столбцов для приведения ![]() к D-форме
к D-форме  а именно
а именно
![]() (310)
(310)
Собственным подпространствам <im B'> и <ker B'> соответствуют здесь системы ортогональных собственных вектор-столбцов указанной модальной матрицы:
Что же касается тригонометрических модальных матриц для диагонализации косопроекторов, то они будут вычислены далее с применением сферическо-гиперболической аналогии. Сейчас же пока мы ограничимся формулами с использованием арифметических корней, но модальные матрицы в них теряют сферическую тригонометрическую природу:
![]() (311)
(311)  (312)
(312)
13.12. Элементарные тензорные сферические тригонометрические функции
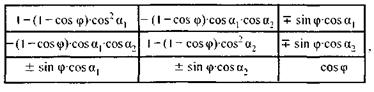
В евклидовом или в квазиеклидовом пространстве выделим группу централизованных непрерывных движений. Такого рода движения известны как однородные. В данном случае они задаются сферическими ротационными матрицами. Как было показано ранее - см. формулы (245), (246), такие движения для точечных элементов, векторов, прямых и гиперплоскостей в декартовом базисе задаются однозначно сферической ротационной матрицей с единственной тригонометрической 2×2-клеткой. Подобного вида тригонометрические матрицы-функции в дальнейшем именуются как элементарные. Они обозначаются с малой буквы, например ротационные функции как rot Ф, rot Θ. В частности, элементарные матрицы могут применяться для описания специальных ротаций в < Qn+1 > - с реперной осью <х n+1 > (с реперной гиперплоскостью) для отсчёта скалярного значения угла ротации φ. Эти матрицы имеют специальную каноническую структуру в универсальном базисе ![]()

 (313)
(313)  (314)
(314)
Координаты матриц даны, как всегда, в правом декартовом базисе ![]() Прямая ориентированная линия <х n+1 > есть реперная (полярная)
Прямая ориентированная линия <х n+1 > есть реперная (полярная)
ось координат, от которой отсчитывается положительный для rot Ф скалярный угол ротации φ с направляющими косинусами cos αk  выраженными в ортогонально дополнительном к реперной оси декартовом суббазисе с координатами хk.
выраженными в ортогонально дополнительном к реперной оси декартовом суббазисе с координатами хk.
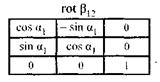
Сначала докажем формулу (313). Применим такое ротационное преобразование дополнительного декартова суббазиса, чтобы новая 1-я ось координат <х1'> и вектор направляющих косинусов тензорного угла Ф, лежащий в плоскости двумерного суббазиса, а именно
 (где cos2α1 + cos2α1 = 1), стали коллинеарны, а в итоге <х3>, еα , <х1'> стали компланарны. Для этой сферической ротации используем другой тензорный угол β12. Отметим, что при n = 2 его скалярный собственный угол β12 совпадает с углом α1. Поэтому искомое ротационное преобразование в данном случае имеет вид:
(где cos2α1 + cos2α1 = 1), стали коллинеарны, а в итоге <х3>, еα , <х1'> стали компланарны. Для этой сферической ротации используем другой тензорный угол β12. Отметим, что при n = 2 его скалярный собственный угол β12 совпадает с углом α1. Поэтому искомое ротационное преобразование в данном случае имеет вид:
Далее в новом трёхмерном декартовом базисе ![]() применяем обычную двумерную каноническую форму для данной элементарной ротации, действующей именно в плоскости <х1', х3>. но с учётом того, что отсчёт угла выполняется от оси <х3> по часовой стрелке, а по отношению к оси < х1'> — против часовой стрелки:
применяем обычную двумерную каноническую форму для данной элементарной ротации, действующей именно в плоскости <х1', х3>. но с учётом того, что отсчёт угла выполняется от оси <х3> по часовой стрелке, а по отношению к оси < х1'> — против часовой стрелки:
Затем возвращаемся в исходный трёхмерный базис ![]() осуществляя обратную ротацию:
осуществляя обратную ротацию:
 (315)
(315)
Нетрудно убедиться, что в итоге после этих операций получаем вышеуказанную формулу (313).
Для вывода общей формулы (314) используем аналогичную схему. Применим такое ротационное преобразование дополнительного декартова суббазиса, чтобы новая 1-я ось координат, вектор направляющих
Косинусов ![]() и реперная ось <хn+1>
и реперная ось <хn+1>
стали компланарны. Для этого используем последовательно другие тензорные углы сферических координат радиус-вектора угла ротации: β12 в плоскости <x1, х2>; β1′3 в плоскости <x1′, х3>; β1′…′n ′ в плоскости <x1′…′, хn>. Причём из тригонометрических соображений имеем:
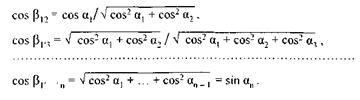 (316)
(316)
Последовательные ротации осуществляют матрицы 
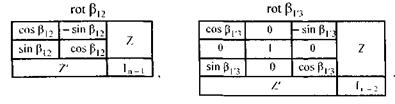
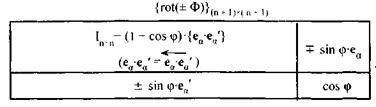
В итоге приходим к базису простейшей 2×2 клеточной формы элементарной ротации:
 (317)
(317)
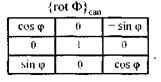
где ![]() Теперь yже в этом декартовом
Теперь yже в этом декартовом
базисе ![]() придаём двумерную каноническую форму данной элементарной ротации в плоскости
придаём двумерную каноническую форму данной элементарной ротации в плоскости 

Затем возвращаемся в исходный базис ![]() осуществляя обратную ротацию:
осуществляя обратную ротацию:
![]() (318)
(318)
После этих операций с учётом соотношений (316) получаем формулу (314). Это нетрудно проверить прямым вычислением. Аналогично, для отрицательного угла элементарной ротации (как угла в той же тригонометрической плоскости) имеем:
![]() (319)
(319)
Если изучается движение точечного элемента, вектора, прямой или гиперплоскости вне связи с другими элементами, то активные и пассивные модальные преобразования информативно полно задаются с использованием только элементарных ротационных матриц. Переход к другим, элементарно связанным (с исходным) декартовым базисам осуществляется в обоих базисах (317) соответственно как
 (320)
(320)
При этом координаты указанных геометрических объектов преобразуются пассивно, как для тензоров валентности 1:
 (321)
(321)
Таким образом, сформулированы основные положения тензорной тригонометрии в евклицовой и квазиевклидовой версии. Евклидова тензорная тригонометрия может рассматриваться как общий случай, когда формально допустимо применение любого срединного рефлектора угла из их полного множества, отвечающего пространству данной размерности. На ряде примеров был продемонстрирован ряд возможностей, которые открывает тензорная тригонометрия для применения в линейной алгебре и аналитической геометрии.
Микромодуль 36.
Тензорная псевдоевклидова тригонометрия
13.13. Гиперболические тензорные тригонометрические функции и рефлекторы
Модальное преобразование (271) порождает псевдогиперболические углы и функции из исходных сферических. Угол {іФ} имеет гиперболический характер. Псевдогиперболическая геометрия именно во внешнем - тензорном варианте реализуется в комплексном бинарном (вещественно-мнимом) особом псевдоевклидовом пространстве ![]() со структурой, задаваемой срединным рефлектором угла или общее — тригонометрическим рефлектор-тензором. Например, из (271) имеем:
со структурой, задаваемой срединным рефлектором угла или общее — тригонометрическим рефлектор-тензором. Например, из (271) имеем:  Скалярное произведение в данном пространстве тождественно таковому в исходном евклидовом пространстве:
Скалярное произведение в данном пространстве тождественно таковому в исходном евклидовом пространстве:

Само по себе особое комплексное псевдоевклидово пространство не представляет интереса. Однако в нём весьма просто осуществляется переход от сферических понятий к гиперболическим. Обратный переход осуществляется в комплексном бинарном квазиевклидовом пространстве. При этом используются псевдоаналоги углов:
![]() (322)
(322)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
