
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В случае ориентированного псевдоевклидова пространства для приведения Roth Г к W-форме используется матрица RW, выходящая из множества матриц, согласованных с рефлектор-тензором  Но заметим, что некотсюая модальная матрица RW приводит совместно Roth Г к W-форме и
Но заметим, что некотсюая модальная матрица RW приводит совместно Roth Г к W-форме и ![]() к D-форме:
к D-форме:
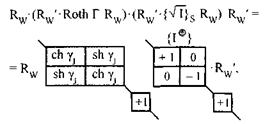
так как, согласно (330),

и действует Правило № 3.
13.16. Скалярная тригонометрия на псевдоплоскости
Диагональный рефлектор-тензор ![]() (см выше) отвечает неориен-
(см выше) отвечает неориен-
тированному пространству, бинарная структура которого согласована с координатными осями. В тригонометрическом базисе гиперболическая ротационная матрица Roth Г имеет каноническую W-форму (324). С другой стороны, для i-й 2×2-клетки две асимптоты квадрогиперболы, или главная и побочная диагонали тригонометрического базиса на i-й псевдоплоскости (рис. 3) задают две координатные оси её же диагональной формы. Ввиду согласованности рефлектор-тензора с ротационными матрицами эти две асимптоты с квадрогиперболой остаются на месте при гиперболическом ротационном преобразовании соответствующей им псевдоплоскости. В исходном псевдоевклидовом пространстве размерности более двух этим геометрическим объектам, как известно, отвечают изотропный конус (асимптотическое плоское подпространство) и вложенные в него полостные гиперболоиды. На какой-либо i-й псевдоплоскости данного пространства, рассекающей гиперболоиды по квадрогиперболе (рис. 3), осуществляется чисто гиперболическая ротация, соответствующая i-й 2×2-клетке Roth Г.
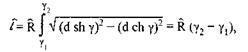
Отсчёт значений скалярных собственных углов γi выполняется во всех гиперболических квадрантах в направлении к главной диагонали. Гиперболический угол γ, как известно, измеряется либо псевдоевклидовой длиной дуги гиперболы, либо удвоенной площадью гиперболического сектора на псевдоплоскости (при ![]()

Здесь единичный радиус-вектор всегда гиперболически ортогонален своей гиперболе в точке касания. В частности, он и касательная задают новые гиперболически связанные оси координат. Фокусу гиперболы соответствует особый скалярный гиперболический угол ![]() рад;
рад; ![]() . Согласно синус-тангенсной аналогии конкретного типа,
. Согласно синус-тангенсной аналогии конкретного типа,  Например,
Например,

Другой вид сферическо-гиперболической аналогии конкретного типа в ![]() устанавливается через отношение изоморфизма между кажущимся сферическим углом φR и гиперболическим углом γR, если принять, что они задаются на плоскости/псевдоплоскости одним и тем же радиус-вектором (рис. 3). Указанная тригонометрическая аналогия определяется исходно через тождество тангенсов
устанавливается через отношение изоморфизма между кажущимся сферическим углом φR и гиперболическим углом γR, если принять, что они задаются на плоскости/псевдоплоскости одним и тем же радиус-вектором (рис. 3). Указанная тригонометрическая аналогия определяется исходно через тождество тангенсов
![]() (354) Другие функции связаны соотношениями:
(354) Другие функции связаны соотношениями:
 (355)
(355)
Данное соответствие определяется как сферическо-гиперболическая тангенс-тангенсная аналогия. Например,![]() . В принципе,
. В принципе,
возможно бесконечное количество вариантов аналогий конкретного типа, но все они сводятся к тождествам вида

Здесь![]()
Практический интерес представляют 4 варианта:
Если конкретную аналогию применить в первом и втором вариантах соместно, то чисто геометрически решаются (с помощью циркуля и линейки) задачи удвоения и бисекции гиперболического угла в универсальном базисе (рис. 3)

В этом случае имеет место неравенство
![]() (357)
(357)
Действительно,

В тензорной тригонометрии представляет особый интерес именно синус-тангенсная аналогия. Она устанавливает непосредственную взаимосвязь в любом универсальном базисе ![]() между преобразованиями и углами в квартовом круге (341). С применением синус-тангенсной аналогии устанавливаются тригонометрические формулы для плоского гиперболически прямоугольного треугольника. Последний определяется как треугольник на псевдоплоскости, у которого две стороны-катеты «а» и «b» принадлежат различным собственным подпространствам рефлектор-тензора, то есть с собственными значениями «+1» и «—1». Катеты образуют прямой угол
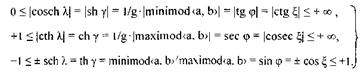
между преобразованиями и углами в квартовом круге (341). С применением синус-тангенсной аналогии устанавливаются тригонометрические формулы для плоского гиперболически прямоугольного треугольника. Последний определяется как треугольник на псевдоплоскости, у которого две стороны-катеты «а» и «b» принадлежат различным собственным подпространствам рефлектор-тензора, то есть с собственными значениями «+1» и «—1». Катеты образуют прямой угол![]() (в гиперболической метрике). Против него лежит гипотенуза «g». Если |b| > |а|, то гипотенуза треугольника находится внутри изотропного конуса и g2 = b2 — а2 (внутренний треугольник). Если |a| > |b|, то гипотенуза треугольника находится вне изотропного конуса и g2 = а2 - b2 (внешний треугольник). Если |a| = |b|, то гипотенуза лежит на поверхности изотропного конуса и g = 0. Против катета с меньшим модулем
(в гиперболической метрике). Против него лежит гипотенуза «g». Если |b| > |а|, то гипотенуза треугольника находится внутри изотропного конуса и g2 = b2 — а2 (внутренний треугольник). Если |a| > |b|, то гипотенуза треугольника находится вне изотропного конуса и g2 = а2 - b2 (внешний треугольник). Если |a| = |b|, то гипотенуза лежит на поверхности изотропного конуса и g = 0. Против катета с меньшим модулем  > лежит угол γ. Против катета с большим модулем maximod <a, b> лежит угол λ. (Гипотенуза g в зависимости от её положения относительно изотропного конуса времениподобна или пространствуподобна ) Имеем:
> лежит угол γ. Против катета с большим модулем maximod <a, b> лежит угол λ. (Гипотенуза g в зависимости от её положения относительно изотропного конуса времениподобна или пространствуподобна ) Имеем:
 (358)
(358)
Здесь и далее γ и λ - основной и допопнитечьный гиперболические углы. Они не равноценны в отличие от φ и ξ - основного и дополнительного сферических углов. В прямоугольном треугольнике на плоскости/псевдоплоскости синус-тангенсная аналогия устанавливает взаимнооднозначное соответствие между его тремя углами (в базисе![]()
![]() (359)
(359)
![]()
 (360)
(360)
13.17. Элементарные тензорные гиперболические тригонометрические функции
Сферическо-гиперболическую аналогию обоих типов (абстрактную и конкретную) можно использовать для упрощённого вычисления матриц элементарных структур в квартовом круге (341) - как моторных, так и рефлективных, если уже известна структура для какой-либо матрицы из круга. Например, аналогично ранее найденным структурам (313), (314) устанавливаются структуры деформационных матриц:
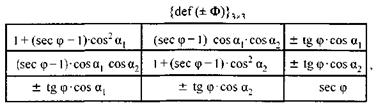 (361)
(361)
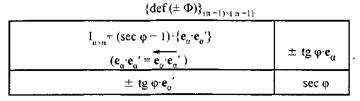 (362)
(362)
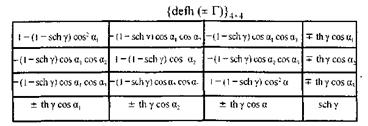
Эти структуры как элементарные, подобно структурам (313), (314), выводятся из исходной 2×2-клетки (292) по тем же схемам модальных преобразований (315), (317), (318). И далее из полученых структур деформационных и ротационных сферических матриц-функций по синус-тангенсной аналогии выводятся родственные структуры ротационных и деформационных гиперболических матриц-функций: 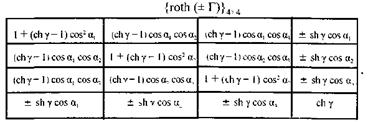 (363)
(363) 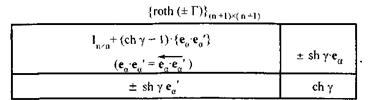 (364)
(364)
 (365)
(365)
Кроме того, та же гиперболическая ротационная матрица-функция выводится из сферической по аналогии абстрактного типа А именно по схеме (322) вещественный синус в ротационной матрице ![]() в (315) преобразуется в мнимый (284) и далее в гиперболический. Отсюда же видно, что обращение ротационных и деформационных матриц-функций сводится к весьма простой операции:
в (315) преобразуется в мнимый (284) и далее в гиперболический. Отсюда же видно, что обращение ротационных и деформационных матриц-функций сводится к весьма простой операции: ![]() или
или
![]() В более общем случае при ротации в другой универсальный базис
В более общем случае при ротации в другой универсальный базис ![]() в указанных тригонометрических матрицах изменяются только координаты вектора направляющих косинусов (пассивно):
в указанных тригонометрических матрицах изменяются только координаты вектора направляющих косинусов (пассивно): в пределах того же евклидова подпространства. Матрицы (313), (314) представляют интерес для изучения движений в 2- и n-мерной сферической геометрии. Матрицы (363), (364) представляют интерес для изучения движений в 3- и n-мерной гиперболической геометрии. Матрицы (363), (365) представляют интерес для изучения преобразований в псевдоевклидовом пространстве Минковского, связанных с физическим движением.
в пределах того же евклидова подпространства. Матрицы (313), (314) представляют интерес для изучения движений в 2- и n-мерной сферической геометрии. Матрицы (363), (364) представляют интерес для изучения движений в 3- и n-мерной гиперболической геометрии. Матрицы (363), (365) представляют интерес для изучения преобразований в псевдоевклидовом пространстве Минковского, связанных с физическим движением.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
