
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
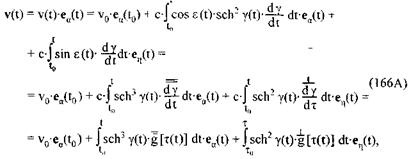
Координатная векторная скорость материальной точки выражается
из (164А) в виде:
где:![]()
![]() (167А)
(167А)
- тангенциальное координатное ускорение, обобщающее (83 А);
![]() (168А)
(168А)
— нормальное координатное ускорение. Обе эти характеристики также не подчиняются теореме Пифагора. Координатная скорость геометрически естественным образом представляется в псевдодекартовом базисе ![]() в <Р3+1> через тангенс гиперболического угла наклона мировой линии по отношению к
в <Р3+1> через тангенс гиперболического угла наклона мировой линии по отношению к ![]() (см. рис. 2А).
(см. рис. 2А).
В том, что только внутренние ускорения подвержены биорто-гональному разложению по теореме Пифагора, имеется глубокий физический смысл. В самом общем виде этот факт обсуждается и объясняется далее в гл. 9А.
Собственное вектор-расстояние соответственно вычисляется двумя способами с идентичной разбивкой на три составляющие  Из (165А) и (166А) имеем:
Из (165А) и (166А) имеем:
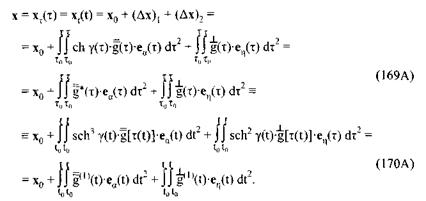
При условии одновременности (85 А), то есть по отношению к ![]() мировые точки в
мировые точки в![]() (гл. 5А) выражаются тождественно в следующих координатных формах:
(гл. 5А) выражаются тождественно в следующих координатных формах:
![]()
В свою очередь, изменение скалярного косинуса, согласно (162А), прямо пропорционально работе собственной силы (81 А) при физическом движении той же материальной точки:
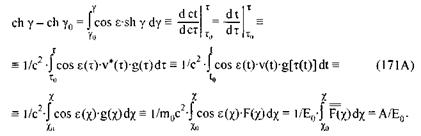
где ![]()
При ![]() имеем:
имеем:
![]()
Следовательно, классическая формула для полной механической энергии Эйнштейна имеет косинусную и поэтому скалярную природу. В процессе произвольного поступательного движения в <Р3+1> полная энергия материального тела в каждой точке мировой линии есть скаляр мгновенного тензора энергии-импульса, подобный координатному времени (на гиперболоиде II). Им прямо пропорциональны аналогичные характеристики для полного импульса и полной массы (гл. 5А). В процессе физического движения все тригонометрические функции его гиперболического угла изменяются согласованно между собой:
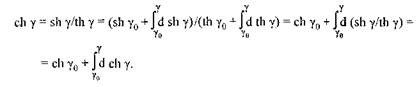
Причина этого состоит в том, что синус и тангенс имеют один и тот же направляющий вектор еα.
Вектор-импульс изменяется как синусная векторная характеристика
![]()
В свою очередь, полная масса, полный импульс и полная энергия изменяются как родственные скалярные косинусные характеристики. Поэтому для синусных и косинусных характеристик имеют место инвариантные соотношения в 3-х тождественных формах:

Весьма интересно, что из (120А) и (135А) для поступательного (в прямом смысле) неколлинеарного движения тела следует сугубо математически эффект его особой релятивистской ортосферической прецессии с отвечающими ей формально моментом количества движения и главным моментом (неинерционной природы в <Р3+1>):
 (172 А)
(172 А)
Ортосферическая прецессия (буст) понимается здесь наиболее общо, нежели конкретная прецессия Томаса для спина электрона. Она обусловлена именно структурой псевдоевклидова пространства-времени. Однако эта прецессия имеет относительный характер, так как псевдодекартов базис в данной точке мировой линии всегда можно выбрать так, что в ней ортогональная составляющая кривизны (ускорения) будет уничтожена, то есть ![]() В таком абсолютном мгновенном базисе
В таком абсолютном мгновенном базисе![]() ось стрелы времени направлена по вектору мгновенной касательной, а
ось стрелы времени направлена по вектору мгновенной касательной, а ![]() обязательно содержит мгновенную псевдонормаль. (Об абсолютных базисах подробно сказано в заключительной главе 10А.) Например, для плоской криволинейной мировой линии, отвечающей некоторому неравномерному прямолинейному физическому движению, вышеуказанный абсолютный базис является неизменным. Критерий, определяющий такой тип мировой линии, есть нулевое кручение при ненулевой кривизне. Поэтому для данного типа движения ортосферическая прецессия является кажущейся (артефактной) характеристикой. В более общем случае — для закрученной мировой линии ортосферическая прецессия сохраняет свой относительный характер, но выбором базиса она может быть уничтожена только локально. Знак «—» в формулах (172 А) иллюстрирует тот факт, что в гиперболической геометрии и в СТО ортосферическая ротация (буст) в мгновенной евклидовой плоскости суммирования движений направлена против направления этого суммирования, в том числе при дифференциальных приращениях движения.
обязательно содержит мгновенную псевдонормаль. (Об абсолютных базисах подробно сказано в заключительной главе 10А.) Например, для плоской криволинейной мировой линии, отвечающей некоторому неравномерному прямолинейному физическому движению, вышеуказанный абсолютный базис является неизменным. Критерий, определяющий такой тип мировой линии, есть нулевое кручение при ненулевой кривизне. Поэтому для данного типа движения ортосферическая прецессия является кажущейся (артефактной) характеристикой. В более общем случае — для закрученной мировой линии ортосферическая прецессия сохраняет свой относительный характер, но выбором базиса она может быть уничтожена только локально. Знак «—» в формулах (172 А) иллюстрирует тот факт, что в гиперболической геометрии и в СТО ортосферическая ротация (буст) в мгновенной евклидовой плоскости суммирования движений направлена против направления этого суммирования, в том числе при дифференциальных приращениях движения.
В свою очередь, при значениях![]() имеем:
имеем:

Заметим, что в изложенной относительной тригонометрической трактовке кинематики и динамики абсолютного (мирового) движения материальных тел в <P3+1> природа активной собственной силы F и вызываемого ею внутреннего ускорения ![]() не имеет значения.
не имеет значения.
Абсолютная тригонометрическая трактовка движения материи по мировым линиям в <P3+1> рассматривается в последней главе 10А.
Глава 8А. Тригонометрические модели движений в сферической геометрии
Квазиевклидово пространство <Qn+1 >, то есть таковое с индексом q = 1, с вложенным в него односвязным гиперсфероидом радиуса R определяется аналогично псевдоевклидову пространству Минковского <Pn+1> с вложенными в него гиперболоидами I и II. В задании < Qn+1> существенную роль играет рефлектор-тензор ![]() как и в задании псевдоевклидова пространства Минковского. Однако при этом квазиевклидово пространство в целом имеет евклидову метрику. Составной частью его геометрии является квазиевклидова тригонометрия. Квазиевклидово пространство с индексом q=1 в каком-либо квазидекартовом базисе представляется прямой сферически ортогональной суммой двух вещественных пространств:
как и в задании псевдоевклидова пространства Минковского. Однако при этом квазиевклидово пространство в целом имеет евклидову метрику. Составной частью его геометрии является квазиевклидова тригонометрия. Квазиевклидово пространство с индексом q=1 в каком-либо квазидекартовом базисе представляется прямой сферически ортогональной суммой двух вещественных пространств:
 (173А)
(173А)
где ![]() - евклидово подпространство,
- евклидово подпространство,![]() - ориентированная реперная ось для отсчёта угла основной сферической ротации φ.
- ориентированная реперная ось для отсчёта угла основной сферической ротации φ.
С точки зрения квазиевклидовой тригонометрии в <Qn+1> подпространство![]() - тангенсная гиперплоскость,
- тангенсная гиперплоскость,![]() - косинусная ось. Заметим, что мнимонизация реперных осей
- косинусная ось. Заметим, что мнимонизация реперных осей ![]() трансформирует < Qn+1> в комплексное псевдоевклидово пространство индекса 1 - изоморфизм псевдоевклидова пространства Минковского. В <Q2+1> реализуется двумерная сферическая геометрия на вложенной сфере.
трансформирует < Qn+1> в комплексное псевдоевклидово пространство индекса 1 - изоморфизм псевдоевклидова пространства Минковского. В <Q2+1> реализуется двумерная сферическая геометрия на вложенной сфере.
В <Qn+1> как исходно аффинном пространстве допускается операция параллельного переноса (в евклидовом смысле). Кроме того, в ориентированном квазиевклидовом пространстве допускаются такие линейные ортогональные преобразования, которые сохраняют пространственную структуру (173А) и исходную правую ориентацию базисов. Это сферические ротации двух типов:
 (174А)
(174А)
— основные сферические ротации;
 (175 А)
(175 А)
- ортосферические ротации (ортогональные по отношению к предыдущим).
Итак, квазиевклидово пространство <Qn+1> определяется как евклидовой метрикой, так и рефлектор-тензором ![]() задающим допустимые в нём преобразования (вместе с евклидовым параллельным переносом). Соответственно в этом пространстве применяются квази-декартовы базисы вида:
задающим допустимые в нём преобразования (вместе с евклидовым параллельным переносом). Соответственно в этом пространстве применяются квази-декартовы базисы вида:
![]() (176А)
(176А)
где ![]() - какой-либо исходный универсальный базис. Именно в этом пространстве реализуется бинарная квазиевклидова тригонометрия индекса 1 в правых базисах. На вложенном в него гиперсфероиде реализуется сферическая геометрия и сферическая тригонометрия того же индекса 1. В универсальных базисах имеет место сферическо-гиперболическая аналогия абстрактного и конкретного типов. В частности, общая тригонометрическая ротация Т определяется по аналогии со (111 А) в форме квазиполярного представления:
- какой-либо исходный универсальный базис. Именно в этом пространстве реализуется бинарная квазиевклидова тригонометрия индекса 1 в правых базисах. На вложенном в него гиперсфероиде реализуется сферическая геометрия и сферическая тригонометрия того же индекса 1. В универсальных базисах имеет место сферическо-гиперболическая аналогия абстрактного и конкретного типов. В частности, общая тригонометрическая ротация Т определяется по аналогии со (111 А) в форме квазиполярного представления:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
