
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (46А)
(46А)
 (47А)
(47А) 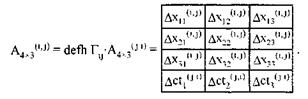 (48А)
(48А)
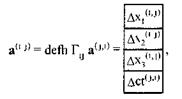
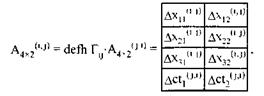
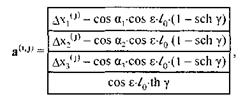
Первые три строки тензоров в новом перекрёстном базисе определяют новые евклидовы характеристики (координаты) объекта в конкретной мировой фиксации. Используя каноническую структуру (365), выразим новые координаты стержня (46А) через исходные:
 (49А)
(49А)
где:![]() - длина стержня в состоянии покоя; ε - угол между
- длина стержня в состоянии покоя; ε - угол между
стержнем в состоянии покоя и вектором антискорости ![]() с направляющими косинусами в суббазисе
с направляющими косинусами в суббазисе ![]() что и у вектора vij в суббазисе
что и у вектора vij в суббазисе ![]() Причём имеем соотношение:
Причём имеем соотношение:
![]() (50А)
(50А)
Изложенное выражает тригонометрическим образом лоренцево сокращение линеорных объектов с точки зрения преобразования их псевдодекартовых координат в состоянии относительного покоя.
Отметим еще один релятивистский эффект: векторы скорости и антискорости образуют гиперболический угол γij, а не тождественны. Если направление скорости совпадает с осью х1, то cos α1 = +1,
cos α 2 = cos α 3 = 0; и новые координаты стержня определяются в виде:
 (51 А)
(51 А)
где дана разбивка на нерелятивистскую и релятивистскую части. Если же при этом ориентация стержня и вектора антискорости одинакова (cos ε = + 1), то имеем:
 (52А)
(52А)
Первая евклидова координата здесь определяется по формуле лоренцева сокращения протяжённости:
![]() (53А)
(53А)
Нормальные относительно вектора антискорости координаты стержня не изменяются. Новые и исходные координаты стержня в (49А) и в частных случаях (51А), (52А) подчиняются квазиевклидову инварианту (43А). Просуммировав квадраты пространственных координат в (49А), получаем квадрат евклидовой длины движущегося стержня. В самом общем случае для ориентированного стержня лоренцево сокращение его евклидовой проекции-фиксации равно
 (54А)
(54А)
В соответствии с принципом Герглотца выявим её релятивистскую и нерелятивистскую составляющие. Часть стержня-фиксации, нормальная вектору антискорости в ![]() , инвариантна и является
, инвариантна и является
нерелятивистской составляющей
![]() (55А)
(55А)
Вычитая из (49А) вектор (55А), получаем релятивистскую часть
![]() (56А)
(56А)
Применяя к данной евклидовой части теорему Пифагора, получаем релятивистскую составляющую квадрата евклидовой длины движущегося стержня  Аналогичным образом из
Аналогичным образом из
(55А) и (50А) получаем нерелятивистскую составляющую Это алгебраически объясняет структуру (54А). (Она же может быть получена графическим способом.) Итак, евклидова длина движущегося стержня складывается, согласно (54А), в ортогональной сумме Герглотца в
Это алгебраически объясняет структуру (54А). (Она же может быть получена графическим способом.) Итак, евклидова длина движущегося стержня складывается, согласно (54А), в ортогональной сумме Герглотца в ![]() из нерелятивистской проекции «sin ε∙l0» и релятивистской проекции
из нерелятивистской проекции «sin ε∙l0» и релятивистской проекции Первая из них есть нормальная проекция стержня относительно вектора антискорости (—vij). При перекрёстном проецировании (гиперболической деформации) она инвариантна. Поэтому данная составляющая сферически ортогональна обоим векторам скоростей:
Первая из них есть нормальная проекция стержня относительно вектора антискорости (—vij). При перекрёстном проецировании (гиперболической деформации) она инвариантна. Поэтому данная составляющая сферически ортогональна обоим векторам скоростей: ![]() Вторая из них получается из параллельной проекции стержня перекрёстным проецированием параллельно
Вторая из них получается из параллельной проекции стержня перекрёстным проецированием параллельно![]() конкретно на направление vij. Квадрат квазиевклидовой длины стержня как в целом, так и только в его релятивистской проекции, согласно (43А), есть квадратичный метрический инвариант вне изотропного конуса, или квазиевклидов инвариант:
конкретно на направление vij. Квадрат квазиевклидовой длины стержня как в целом, так и только в его релятивистской проекции, согласно (43А), есть квадратичный метрический инвариант вне изотропного конуса, или квазиевклидов инвариант:
![]() (57А)
(57А)  (58А)
(58А)
Инвариант (58А) приводится к тригонометрической форме
![]() (59А)
(59А)
где γk" — гиперболический угол между вектором антискорости (-vij) и осью хk в суббазисе Это инвариант
Это инвариант
деформационных гиперболических преобразований для единичного пространствуподобного линейного элемента. Собственная длина стержня, то есть его евклидова длина в состоянии покоя, - квазиевклидов метрический инвариант в любых других перекрёстных базисах ![]() в частности, и в
в частности, и в ![]()
![]() (60А)
(60А)
Родственная формула (54А) выражает тригонометрически релятивистский эффект лоренцева сокращения евклидовой протяжённости движущегося стержня вдоль направления его физического движения. Данный эффект также имеет чисто координатную природу. Отметим, что эффект сокращения движущегося объекта исторически впервые установил Фитцжеральд (1892 г.).
Множество всех мировых фиксаций движущегося стержня по сути полуоткрытое, так как оно не содержит крайних сечений его мировой траектории гиперповерхностью изотропного конуса (рис. 1А). Указанные крайние сечения имеют нулевую евклидову длину релятивистской ортопроекции, а для объектов ранга > 1 имеют нулевые евклидовы нормы порядка 1 и 2 для релятивистской составляющейпроекции и порядка 3 — для их объёмной фиксации в целом. Они соответствуют объектам, движущимся как бы со скоростью света.
Рассматриваемый пространствуподобный феномен в новом перекрёстном базисе![]() согласно (49А), имеет и временнỳю проекцию. Но эта проекция относится к стреле времени
согласно (49А), имеет и временнỳю проекцию. Но эта проекция относится к стреле времени![]() Следовательно, она трактуется в системе
Следовательно, она трактуется в системе![]() и объясняется так. Наблюдатель Nj воспринимает другой равноценный стержень, покоящийся на оси х(i), как укороченный с евклидовой длиной, тождественно равной (53А). Когда в процессе движения оба стержня сойдутся, их отдельно левые и отдельно правые концы встретятся с эксцессом времени в системе
и объясняется так. Наблюдатель Nj воспринимает другой равноценный стержень, покоящийся на оси х(i), как укороченный с евклидовой длиной, тождественно равной (53А). Когда в процессе движения оба стержня сойдутся, их отдельно левые и отдельно правые концы встретятся с эксцессом времени в системе![]()
![]() (61 А)
(61 А)
В классической кинематике его бы не было. Конечно, в обоих случаях одновременность трактуется по Эйнштейну, чтобы не учитывать время распространения света от одного конца стержня к другому Это релятивистский эффект неодновременности встречи начала и конца двух равноценных стержней (коллинеарных и соосных направлению движения). Он обусловлен тем, что движущееся евклидово пространство претерпевает гиперболическую ротацию (как и стрела времени), а вместе с ним и стержень. Формула (61А) выражает эксцесс времени для случая, когда один из стержней покоится, а другой движется. Если сопоставить друг против друга равноценные точки этих стержней, то контакт пар точек при встрече стержней распространяется в системе ![]() вдоль оси x(j) слева направо со сверхсветовой скоростью:
вдоль оси x(j) слева направо со сверхсветовой скоростью:
![]() (62А)
(62А)
Понятно, что в классической кинематике все эти пары точек встречаются одновременно.
В квазиплоскости гиперболической деформации, тождественной псевдоплоскости гиперболической ротации, рассматриваемая задача сводится к решению плоского "внешнего" гиперболически прямоугольного треугольника, в котором l(ij) — гипотенуза «g», l0 - катет «а» и ∆ct(i, j) - катет «b» (см. рис. 1 А).
Заметим, что в произведениях (46А)-(48А) деформационная гиперболическая матрица действует формально в усечённом виде, а именно только своими тремя верхними строками. (Сравним это с аналогичным замечанием в гл. 5А для ротационного преобразования координат.) Вызвано это тем, что исходные линейные элементы (линеоры) параллельны собственному евклидову подпространству.
Результат лоренцева сокращения движущегося векторного элемента выражается в векторном виде формулой (49А), а в скалярном виде
формулой (54А). В перекрёстном базисе ![]() для двух векторов имеем:
для двух векторов имеем:
![]()
Здесь используется обычное выражение для косинуса скалярного угла между векторами-фиксациями в евклидовом подпространстве ![]() Применив к этому выражению ранее полученное соотношение (54А), в итоге получаем релятивистский вариант формулы для косинуса угла между двумя вместе движущимися векторными элементами:
Применив к этому выражению ранее полученное соотношение (54А), в итоге получаем релятивистский вариант формулы для косинуса угла между двумя вместе движущимися векторными элементами:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
