
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
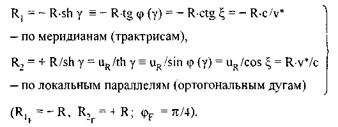
Гиперпсевдосфера Бельтрами получается вращением трактрисы с числом степеней свободы (n - 1). Главные радиусы её сферической кривизны:
 (109 А)
(109 А)
Здесь ![]() - угол между нормалью
- угол между нормалью![]() к поверхности и
к поверхности и
локальным радиусом вращения uR, согласно теореме Менье. Он же, согласно (26А), есть угол параллельности Лобачевского, но в геометрии Бельтрами. Меридианы и локальные параллели псевдосферы используются в качестве геодезических (нормальных) криволинейных координат в её внутренней геометрии. Гауссова кривизна псевдосферы выражается в виде:
![]()
Это, согласно теореме Бельтрами, определяет на поверхности гиперпсевдосферы гиперболическую метрику Ламберта, или метрику геометрии Лобачевского - Больяи.
С другой стороны, главные радиусы псевдокривизны гиперболоида I Минковского (гиперболической и сферической) постоянны по всей его поверхности:
R1 = - R - по меридианам (гиперболам),
R2 = + R - по локальным параллелям (ортогональным дугам).
Соответственно эти меридианы и локальные параллели могут использоваться в качестве геодезических (псевдоортогональных) криволинейных координат в его внутренней геометрии.
В геометрии Лобачевского - Больяи «R» есть некий вселенский параметр, или константа Гаусса—Швепкарта. Он характеризует степень искривления пространства Лобачевского - Больяи по отношению к плоскому евклидову пространству. Он же есть радиус гипотетической мнимой сферы Ламберта - Тауринуса, воплощённой впоследствии в гиперболоиде II Минковского. Обратим внимание на то, что гиперболоид II (верхний) повсюду вогнут и его радиус псевдокривизны постоянен во всех точках, как для сферы. А именно он равен «+ iR». Изначальная идея Ламберта и последующее её развитие Тауринусом исторически открывали наиболее простой и естественный путь к реализации полноценной гиперболической неевклидовой геометрии — таковой на сфере мнимого радиуса. Этот путь стал возможен к реализации в полном объёме после открытия Пуанкаре и Минковским псевдоевклидова пространства с целью его применения в теории относительности.
Зоммерфельд (1909 г.) впервые установил гиперболический характер закона сложения скоростей в СТО, рассмотрев его действие как бы на сфере мнимого радиуса для случаев двух коллинеарных и двух ортогональных скоростей. Варичак (1910 г.) сделал предположение о тождественности закона сложения скоростей и правила сложения отрезков в геометрии Лобачевского - Больяи. Теоретическое обоснование этому дал Клейн, доказав изоморфизм группы Лоренца и группы однородного движения в пространстве Лобачевского — Больяи. Он же дал трактовку гиперболической геометрии в псевдоевклидовом пространстве Минковского - на гиперболоиде II.
Сценарий дальнейшего развития событий в данной области исследований был предопределён. Решающую роль в понимании того, что различные способы построения одной и той же неевклидовой геометрии приводят к тождественным конечным результатам сыграли классические проективные модели Клейна и Пуанкаре. Отсюда на первый план выходит выбор наиболее простого и наглядного способа аналитического изучения неевклидовых геометрий вообще.
В данной рабрте для изучения движений и деформаций в гиперболической и в сферической неевклидовых геометриях применяются относительно простые средства квадратичной тензорной тригонометрии. Тригонометрический подход к данной проблеме (в скалярной форме) был применён впервые именно в изначальных классических работах Пуанкаре и Минковского по СТО. Неевклидовы геометрии рассматриваются здесь внешним образом — с позиции тензорных тригонометрий объемлющих линейных метрических пространств <Рn+1> и <Qn+1>. При этом используются соответствующие линейные тригонометрические преобразования ротационного (синусно-косинусного) и деформационного (тангенсно-секансного) типа в элементарных формах.
Кроме того, такая внешняя точка зрения позволяет, в принципе, изучать движения в любых многомерных геометриях с постоянной кривизной (в гиперболических - с отрицательной и в сферических - с положительной) в наиболее общем виде. Такого рода геометрии присущи собственному гиперболоиду в <Рn+q> и собственному гиперсфероиду в <Qn+q> при q ≥ 1. Для них ротационные и деформационные тригонометрические преобразования применяются в самых общих формах, изложенных в основной части этой работы. В частности, каждому рефлектор-тензору объемлющего пространства отвечают собственные множества псевдоевклидовых и квазиевклидовых тригонометрических ротаций (рефлексий), а также их общее подмножество ортосферических ротаций (рефлексий).
Глава 7А. Тригонометрические модели неколлинеарных двух-, многоступенчатых и интегральных движений в СТО и в гиперболической геометрии
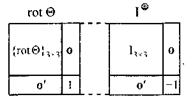
Продолжим изучение двух- и многоступенчатых гиперболических ротаций - движений, но уже не обязательно в пределах одной и той же псевдоплоскости. Как и ранее, для анализа многоступенчатых, но теперь элементарных ротаций применяется полярное разложение итогового преобразования типа (474), (475). Напомним, что в этом разложении одна и та же сферическая ротационная матрица всегда выражается в базисе своего действия. Согласно (497), она имеет общую структуру, отвечающую рефлектор-тензору псевдоевклидова пространства Минковского по следующей схеме:
 (110А)
(110А)
В свою очередь, гиперболическая ротационная матрица roth Г в базисе своего действия, как и в любом другом собственном универсальном базисе, имеет каноническую форму (363). Здесь фигурируют тензорные углы: Г - угол гиперболической ротации; 0 - угол ортосферической ротации (ортогональной по отношению к Г), согласно их определению в (349). Все они отвечают заданному рефлектор-тензору пространства. Вначале рассмотрим двухступенчатую элементарную гиперболическую ротацию с целью наиболее общего - матричного вывода закона суммирования двух движений (скоростей) в скалярной, векторной и тензорной формах. Новый псевдодекартов базис представляется различными способами с учётом (486) и (491) в виде:
 (111А)
(111А)
Матрицы roth Г12 и roth Г13 выражены и действуют в![]() Матрица roth Г21 исходно выражена и действует в
Матрица roth Г21 исходно выражена и действует в![]() Матрица
Матрица
rot Θ13 в первом случае выражена и действует в гиперболически смещённом базисе  Во втором случае она выражена
Во втором случае она выражена
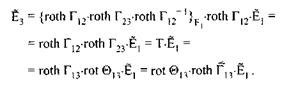
и действует в исходном базисе![]() Как было показано ранее при многоступенчатых движениях в формулах активных преобразований координат базисов или элементов пространства применяется обратный порядок следования исходно заданных частных матриц. В свою очередь, при пассивном преобразовании координат элемента имеет место прямой порядок. Для его полярного представления имеем:
Как было показано ранее при многоступенчатых движениях в формулах активных преобразований координат базисов или элементов пространства применяется обратный порядок следования исходно заданных частных матриц. В свою очередь, при пассивном преобразовании координат элемента имеет место прямой порядок. Для его полярного представления имеем:
![]()
Итоговая гиперболическая ротация выполняется в двух указанных вариантах — либо из ![]() как roth Г13, либо из сферически смещённого базиса
как roth Г13, либо из сферически смещённого базиса ![]() как
как
roth![]() (112 А)
(112 А)
Вектор направляющих косинусов угла![]() смещён сферически в
смещён сферически в
обратную сторону
![]() (113А)
(113А)
Согласно формулам полярного представления (474), (475) и с учётом (111 А) имеем:
![]() (114А)
(114А)
![]() (115А)
(115А)
В случае ![]() при перемене порядка последовательности движе-
при перемене порядка последовательности движе-
ний или скоростей на противоположный новый псевдодекартов базис задают вектор-строки той же матрицы ![]()
![]() (116А)
(116А)
Матрицы roth Г23 и выражены и действуют в
выражены и действуют в![]()
Матрица roth Г12 исходно выражена и действует в![]() Итоговая гиперболическая ратация выполняется в двух вариантах — либо из
Итоговая гиперболическая ратация выполняется в двух вариантах — либо из ![]() как roth
как roth![]() либо из сферически смещённого базиса
либо из сферически смещённого базиса
![]() как roth Г13. В этом заключается двойственность
как roth Г13. В этом заключается двойственность
во взгляде на матрицу![]() Для обратного порядка имеем:
Для обратного порядка имеем: ![]() (117А)
(117А)
![]() (118А)
(118А)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
