
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (496)
(496)
С использованием сферическо-гиперболической аналогии абстрактного типа (323) осуществляется формальный переход от моделей движения в гиперболической геометрии к моделям движения в сферической геометрии. Ранее такой же подход, но в обратную сторону применялся при выводе структур матриц гиперболических ротаций (363), (364) из уже доказанных структур матриц сферических ротаций (313). (314) с реперной осью.
Изоморфизм ротаций в объемлющем централизованном <квази-евклидовом, псевдоевклидовом> пространстве и геометрических движений на вложенной в него (сферической, псевдосферической) гиперповерхности связывает также изоморфно внешнюю ротационную тригонометрию объемлющего пространства и внутреннюю геометрию гиперповерхности с данным инвариантом. В частности, ротационные тригонометрии в квазиевклидовом пространстве с реперной осью и в пространстве Минковского размерности (n +1) изоморфны геометриям на n-мерной сфере и n-мерных гиперболоидах Минковского I и II (в сопутствующих n-мерных гиперболических неевклидовых пространствах) с учётом их инварианта — радиуса R.
13.36. Ротации и деформации в псевдоевклидовом пространстве Минковского
Далее на примере простейших псевдоевклидовых пространств Минковского <Рn+1>, где n ≤ 3, покажем: как работает формула (474) для классификации псевдоевклидовых ротаций, или непрерывных однородных движений Лоренца. Конечно, данная формула применима для этого и в более сложных случаях.
При n = 1 возможна только элементарная гиперболическая ротация, автоматически согласованная с рефлектор-тензором. Эта ротация реализуется геометрически как движение по гиперболе.
При n = 2 возможны элементарная сферическая ротация (в пределах множества централизованных плоскостей в трёхмерной внешней полости изотропного конуса) и элементарная гиперболическая ротация (в пределах множества централизованных псевдоплоскостей с осью ![]() в трехмерной внутренней полости изотропного конуса). Эти ротации реализуются как движения по сферическим и гиперболическим траекториям на двумерных гиперболоидах Минковского I и II.
в трехмерной внутренней полости изотропного конуса). Эти ротации реализуются как движения по сферическим и гиперболическим траекториям на двумерных гиперболоидах Минковского I и II.
При n = 3 возможны элементарная сферическая ротация (в пределах множества централизованных плоскостей в четырёхмерной внешней полости изотропного конуса) и элементарная гиперболическая ротация (в пределах множества централизованных псевдоплоскостей с осью ![]() в четырёхмерной внутренней полости изотропного конуса). Эти ротации реализуются как движения по сферическим и гиперболическим траекториям на трёхмерных гиперболоидах Минковского I и II.
в четырёхмерной внутренней полости изотропного конуса). Эти ротации реализуются как движения по сферическим и гиперболическим траекториям на трёхмерных гиперболоидах Минковского I и II.
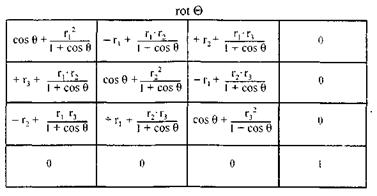
Итак, при n ≤ 3 и q = 1 любые тригонометрические ротации Лоренца, согласно (474), сводятся к однократной элементарной ортосферической ротации rot Θ и затем однократной элементарной гиперболической ротации roth Г, согласованным с рефлектор-тензором псевдоевклидова пространства Минковского. Сферическая ротация элементарна, в силу того что n ≤ 3 в структуре (473). Гиперболическая ротация элементарна в любом пространстве Минковского.
В данном случае между rot Θ и roth Г имеется принципиальное отличие, заключающееся в формах их представлений. Гиперболическая ротация имеет реперную ось ![]() для отсчёта угла γ. Её структура (363), (364) и псевдоплоскость ротации γ определяются вектором направляющих косинусов (выраженных в декартовой части базиса). Форма представления rot Θ определяется только её общей структурой (473). Например, в <Р2+1> её 2×2-блок есть элементарная сферическая ротационная клетка. Однако в <Р 3+1> её 3×3-блок rot Θ3×3 целесообразно представить как сферическую ротацию с фиксированной нормальной осью rN. Тогда структура и плоскость ротации θ определяются вектором направляющих косинусов нормальной оси ротации
для отсчёта угла γ. Её структура (363), (364) и псевдоплоскость ротации γ определяются вектором направляющих косинусов (выраженных в декартовой части базиса). Форма представления rot Θ определяется только её общей структурой (473). Например, в <Р2+1> её 2×2-блок есть элементарная сферическая ротационная клетка. Однако в <Р 3+1> её 3×3-блок rot Θ3×3 целесообразно представить как сферическую ротацию с фиксированной нормальной осью rN. Тогда структура и плоскость ротации θ определяются вектором направляющих косинусов нормальной оси ротации  (выраженных в декартовой части базиса):
(выраженных в декартовой части базиса):
 (497) Пусть cos σk и cos
(497) Пусть cos σk и cos![]() - направляющие косинусы углов
- направляющие косинусы углов
![]() из (474), (475) в структуре (363);
из (474), (475) в структуре (363); ![]() - единичные векторы направляющих косинусов в структуре (364). Применив ротационную формулу (476), последовательно получаем:
- единичные векторы направляющих косинусов в структуре (364). Применив ротационную формулу (476), последовательно получаем:
 (498)
(498)
В <Р3+1> единичные векторы ![]() в силу (498) однозначно задают
в силу (498) однозначно задают
вектор нормальной оси ротации rot Θ через их векторное (синусное) произведение:
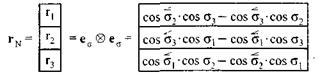 (499)
(499)
Векторы ![]() образуют правую тройку, что соответствует
образуют правую тройку, что соответствует
принятому в работе направлению отсчёта угла θ против часовой стрелки: ориентированный вектор rN задаёт правый винт ротации;
![]()
Наряду с чисто гиперболическими и сферическими ротациями в псевдоевклидовом пространстве Минковского представляют особый интерес, а именно в универсальном базисе, допустимые элементарные гиперболические деформации. В тригонометрической форме они представлены в (496). В базисе своего действия они имеют структуру типа (365) и совершаются в псевдоплоскости, соответствующей углу Г. Направляющие косинусы для матриц roth Г и defh Г тождественны. В базисе диагонального косинуса эти матрицы и рефлектор-тензор имеют общую бинарно-клеточную структуру:
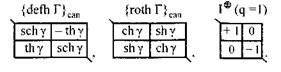
Из прародительской структуры, аналогично (471), порождается чистый тип гиперболической деформационной матрицы:
 (500) Деформационные преобразования, конечно, не относятся к группе Лоренца, так как не удовлетворяют условию (460). Хотя при этом соотношения (500) по форме и совпадают с (470). Но согласования матриц rot Θ и defh Г с рефлектор-тензором
(500) Деформационные преобразования, конечно, не относятся к группе Лоренца, так как не удовлетворяют условию (460). Хотя при этом соотношения (500) по форме и совпадают с (470). Но согласования матриц rot Θ и defh Г с рефлектор-тензором ![]() осуществляются различно. А именно, первые согласуются по его единичному блоку, а вторые согласуются по какой-либо его знакопеременной 2×2-клетке. Иначе говоря, первые действуют в плоскостях, а вторые - в псевдоплоскостях. Хотя матрицы deflh Г не удовлетворяют псевдоевклидову метрическому соотношению (460), но они же в универсальном базисе формально удовлетворяют евклидову метрическому соотношению, что следует из (500). Поэтому для этих матриц в псевдоплоскости деформации действует перекрестный евклидов инвариант. Согласно сферическо-гиперболической аналогии конкретного, синус-тангенсного типа в
осуществляются различно. А именно, первые согласуются по его единичному блоку, а вторые согласуются по какой-либо его знакопеременной 2×2-клетке. Иначе говоря, первые действуют в плоскостях, а вторые - в псевдоплоскостях. Хотя матрицы deflh Г не удовлетворяют псевдоевклидову метрическому соотношению (460), но они же в универсальном базисе формально удовлетворяют евклидову метрическому соотношению, что следует из (500). Поэтому для этих матриц в псевдоплоскости деформации действует перекрестный евклидов инвариант. Согласно сферическо-гиперболической аналогии конкретного, синус-тангенсного типа в ![]() имеем:
имеем:
Ввиду того что все матрицы действуют в одной и той же псевдоплоскости, то и согласуются с рефлектор-тензором сходным образом:
![]()
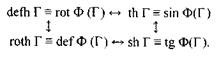
Важно отметить, что все эти четыре соотношения в универсальном базисе имеют место как в гиперболической, так и в сферической геометриях. Поэтому они представлены здесь в самом общем виде — через углы ротации Г и Ф с рефлектор-тензором  Основное
Основное
различие между ними заключается в том, что в гиперболической геометрии в допустимом псевдодекартовом базисе в <Рn+1> действует только определяющее движения соотношение roth с другой стороны, в сферической геометрии в допустимом квазидекартовом базисе в <Qn+1> действует только определяющее движения соотношение
с другой стороны, в сферической геометрии в допустимом квазидекартовом базисе в <Qn+1> действует только определяющее движения соотношение Во внешних вариантах
Во внешних вариантах
они реализуются на собственных гиперболоидах Минковского I и II в псевдоевклидовом пространстве <Рn+1> (первое) и на собственном гиперсфероиде в квазиевклидовом пространстве <Qn+1> (второе).
Основные свойства деформационных матриц и преобразований сходны с таковыми для ротационных. Но для них Правило №2, в части алгебраического суммирования тригонометрически согласованных углов-аргументов, не выполняется. (Хотя коммутативность матриц с согласованными углами сохраняется.) Деформационные матрицы целесообразно применять в <Рn+1>, например, при перекрестном (недекартовом) проецировании, то есть при определении перекрёстных координат или перекрёстных проекций. Такое проецирование в <Р3+1> формально математически интерпретирует лоренцево сокращение пространственных образов линейных объектов в направлении их физического движения. Согласно исконной блочной структуре (442), для деформационных матриц имеют место соотношения - аналоги (482).
13.37. Специальный математический принцип относительности
Все утверждения, относящиеся к <евклидовой, квазиевклидовой, псевдоевклидовой) геометрии за вычетом её аффинной части, имеют место именно в <декартовом, квазидекартовом, псевдодекартовом> базисе <евклидова, квазиевклидова, псевдоевклидова> пространства. Любая геометрия с квадратичным инвариантом (или квадратичная геометрия) как свод утверждений по их форме никак не связана с выбором конкретного допустимого базиса за исходный единичный базис. Иначе говоря, <евклидова, квазиевклидова, псевдоевклидова> геометрия инвариантна по отношению к преобразованиям, осуществляющим переход от одного вышеуказанного базиса к другому, то есть она инвариантна к <ортогональным, квазиортогональным, псевдоортогональным> преобразованиям и к операции параллельного переноса в пространстве. (Ориентация в указанных пространствах сохраняется именно при непрерывных преобразованиях.)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
