
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Следствия
1. Простой несимметричный корень![]() задаёт в
задаёт в ![]() взаимнооднозначно сферически косогональные проектор, рефлектор и тригонометрические функции
взаимнооднозначно сферически косогональные проектор, рефлектор и тригонометрические функции ![]() и однозначно пару эквиранговых ортопроекторов и орторефлектооов. а также тензорный угол
и однозначно пару эквиранговых ортопроекторов и орторефлектооов. а также тензорный угол ![]() и тригонометрические функции
и тригонометрические функции
2. Все характеристические проекторы а также тригонометрические функции угла
а также тригонометрические функции угла ![]() и соответствующие им рефлекторы (тригонометрические корни) в
и соответствующие им рефлекторы (тригонометрические корни) в ![]() приводятся к согласованным W-формам в одном и том же ортонормированном базисе {Rw} при исходном декартовом базисе
приводятся к согласованным W-формам в одном и том же ортонормированном базисе {Rw} при исходном декартовом базисе
(Наиболее общо аналогичные ''тригонометрические" утверждения имеют место для симметричных и простых несимметричных корней типа![]()
13.8. Моторные тензорные синус, косинус, секанс и тангенс
Тензорный косинус и синус моторного угла формально определяются через ротационную ортогональную матрицу (det R = +1 ↔ R = = Rot Ф) как-

Тензорный секанс и тангенс моторного угла пока определим формулами:

Очевидны тригонометрические соотношения, аналогичные ранее полученным для проективных функций:
![]() (263)
(263)
 (264)
(264)
Вышеуказанные пары моторных функций коммутативны:
![]() (265,266)
(265,266)
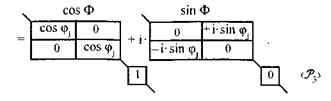
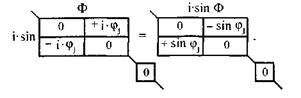
Для углов и функций моторного типа необходимо выполняется условие  Канонические W-формы вещественной ортогональной матрицы, а также моторного косинуса и синуса в тригонометрическом базисе имеют вид:
Канонические W-формы вещественной ортогональной матрицы, а также моторного косинуса и синуса в тригонометрическом базисе имеют вид:
![]() (267)
(267)
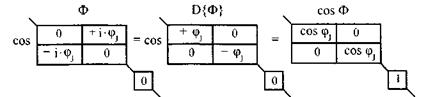
Далее установим канонические формы моторных функций и угла. Для этого сначала перейдём в комплексный базис диагональной формы синуса, а затем вернёмся в исходный вещественный тригонометрический базис (то есть в базис диагонального косинуса). Это в итоге тождественное модальное преобразование позволяет установить каноническую форму моторного угла в тригонометрическом базисе:
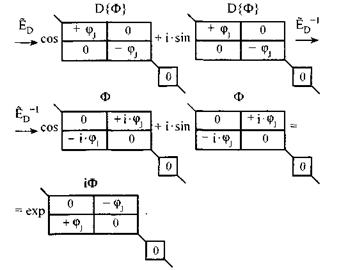
(Заметим, что для матриц, комплексифицированных за счёт перехода из декартова в эрмитово ортонормированный базис, при сопряжении используется операция эрмитова транспонирования.) В дополнение к формулам (164) и (170) для углов проективного типа отсюда вытекают родственные соотношения для углов моторного типа:
![]() (268)
(268)
 (эта формула более очевидна, если использовать ряд Маклорена),
(эта формула более очевидна, если использовать ряд Маклорена),
13.9. Взаимосвязь между проективными и моторными тригонометрическими функциями и углами
С учётом (236)-(239), (261), (262) и (267) получаем соотношение:
 (269)
(269)

 (270)
(270)
Правило №4. Квадраты и любые чётные степени тензорного угла проективного и моторного типа, а также их тригонометрических функций одноимённого вида равны.
Углы ![]() суть симметричный и эрмитов тензоры, приводимые к
суть симметричный и эрмитов тензоры, приводимые к
тождественным диагональным формам, но в различных ортогональных базисах — декартовом и эрмитово ортонормированном. Здесь, конечно, подразумевается, что ![]() например при
например при![]()
Далее для преобразования вещественных тригонометрических функций в их комплексные псевдоаналоги (с целью последующего естественного ввода тензорных гиперболических функций) определим комплексный тригонометрический базис. Ему отвечает модальная матрица соответствующего перехода - псевдоарифметический квадратный корень из срединного рефлектора тензорного угла (248):
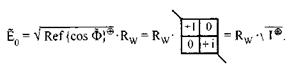 (271)
(271)
При этом подпространству ![]() соответствует либо мнимо-
соответствует либо мнимо-
единичный блок (2r < n), либо положительный единичный блок (2r > n), либо этот блок вовсе отсутствует (2r = n). Комплексный тригонометрический базис отличается от вещественного тем, что в нём координаты, соответствующие отрицательным собственным значениям проективного косинуса (то есть ординаты), мнимонизированы:  При переходе в комплексный тригонометрический базис косинус и секанс не изменяются, а угол, синус и тангенс трансформируются в псевдогиперболические аналоги. (Далее нижние индексы «r» и «с» отвечают вышеуказанным вещественному и комплексному тригонометрическому базису.)
При переходе в комплексный тригонометрический базис косинус и секанс не изменяются, а угол, синус и тангенс трансформируются в псевдогиперболические аналоги. (Далее нижние индексы «r» и «с» отвечают вышеуказанным вещественному и комплексному тригонометрическому базису.)
![]() (272)
(272)
 (273)
(273) ![]() (274)
(274) ![]() (275)
(275) ![]() (276)
(276)
Ниже сопоставлены канонические формы угла и функций в тригонометрических базисах - вещественном (слева) и комплексном (справа):
 (277)
(277)  (278)
(278)  (279)
(279)  (280)
(280)  (281)
(281)  (282)
(282)  (283)
(283)  (284)
(284)
 (285)
(285)
 (286)
(286)
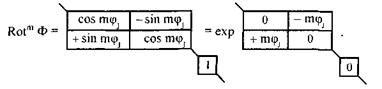
Для ротационной ортогональной матрицы справедливы формулы Муавра и Эйлера:
 (287)
(287)
В вещественном тригонометрическом базисе это интерпретируется как
В комплексном тригонометрическом базисе это интерпретируется как
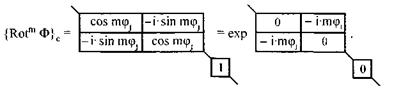
(Если в эти формулы подставить m = 1/2 , то таким образом можно вычислить тригонометрический квадратный корень (245) из ротационной матрицы-функции.)
13.10. Деформационные тензорные тригонометрические функции от сферических углов моторного типа
К сферической ротационной матрице-функции ранее формально привело последовательное применение ортогональных рефлекторов, связанных с двумя эквиранговыми линеорами (планарами), согласно (243). Аналогичным образом, с использованием принципа бинарности последовательное применение косогональных рефлекторов, связанных с той же парой эквиранговых линеоров (планаров), формально приводит к определению другого нового понятия - сферической деформационной матрицы-функции. Как и ротационная матрица-функция, она имеет бинарную элементарную тригонометрическую структуру в виде:

При этом подпространству![]() в указанном произведении всегда
в указанном произведении всегда
соответствует диагонально-единичный блок. В целом же указанная матрица-функция осуществляет сферическую деформацию на тензорный угол αB. В аналитической форме это матричное преобразование реализуется аналогично (243) и (244):

Приставка «Def» обозначает деформационную матрицу-функцию от тензорного сферического угла моторного типа. Но если ротационные тензорные функции имеют синусно-косинусную природу, то как бы аналогичные им по формальному определению деформационные тензорные функции имеют тангенсно-секансную природу. (Полной аналогии в сферическом варианте угла здесь, очевидно, нет.) Бинарная тензорная деформация осуществляется также, как и ротация, в тригонометрическом подпространстве (рис. 2) относительно его сферически ортогонального дополнения. Тензорные секанс и тангенс теперь уже вполне естественным путём определяются через сферическую деформационную матрицу соотношениями, аналогичными (259) и (260):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
