
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
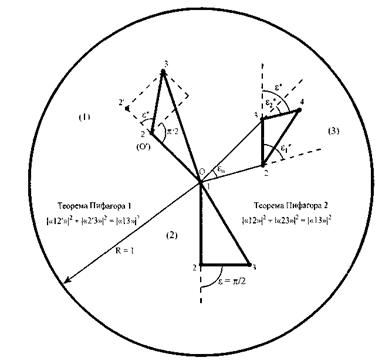
Рис. 4А. Суммирование двух тангенсных проекций гиперболических отрезков — движений в плоской модели Клейна по теореме о приведении их суммы к биортогональной форме:
Вариант1. Централизованный в треугольник.

Вариант 2. Централизованный в![]() прямоугольный треугольник.
прямоугольный треугольник.

Вариант 3. Децентрализованный в![]() треугольник, компланарный с центром О.
треугольник, компланарный с центром О.

В процессе перекрёстного проецирования начало искажаемого вектора в однородных координатах переносится в точку О' - конец вектора th γ12 (рис. 4А). Искажённый угол ε* между векторами th γ12 и th γ23 в модели Клейна вычисляется через искажённые проекции th γ23, согласно формуле евклидовой скалярной тригонометрии:
![]() (158А)
(158А)
(если ε = π/2, то он не искажается:
В формуле фигурируют коэффициент искажения k2 и коэффициент лоренцева сокращения (54А), то есть k3, но для модуля вектора th γ23 в целом. Заметим, что в СТО ε* есть реально искажаемый в![]() сферический угол между векторами скоростей v12 и v23 (гл. 4А).
сферический угол между векторами скоростей v12 и v23 (гл. 4А).
В более общем случае (рис. 4А) искажённый угол ε* между векторами th γ23 и th γ34 в плоской модели Клейна вычисляется через искажённые частные углы ε1* и ε2*, а также неискажённый центральный угол ε0 (между th γ12 и th γ13) с использованием соотношений:
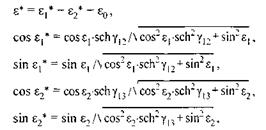 (159 А)
(159 А)
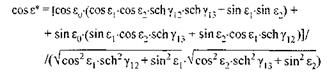 (160А)
(160А)
(если ![]() в зависимости от знаков ε1 и ε2).
в зависимости от знаков ε1 и ε2).
В самом же общем случае для пары векторов th γ23 и th γ34 в пространственной модели Клейна искажение угла между векторами тангенсов можно вычислить исходя из биортогонального разложения второго вектора th γ34 в собственном ![]() на проекции-параллельно и перпендикулярно характеристической плоскости
на проекции-параллельно и перпендикулярно характеристической плоскости ![]()
![]() Для этого предварительно обобщим формулу (136 А), применив ортогональные собственные проекторы, которые проецируют в данном случае в трёхмерном евклидовом пространстве (или проективной гиперплоскости) ортогонально <ker А'>:
Для этого предварительно обобщим формулу (136 А), применив ортогональные собственные проекторы, которые проецируют в данном случае в трёхмерном евклидовом пространстве (или проективной гиперплоскости) ортогонально <ker А'>:
![]()
(В трёхмерном пространстве![]() этот же вектор можно
этот же вектор можно
вычислить через внешнее произведение![]() В данном
В данном
случае еη - вектор направляющих косинусов условно ортогонального приращения общего движения по отношению к![]()
![]()
В пространстве ![]() вектор th γ23 разлагается биортогонально на
вектор th γ23 разлагается биортогонально на
проекции:
![]()
с направляющими векторами![]() В
В ![]() эти проекции не
эти проекции не
искажаются и подчиняются теореме Пифагора.
Угол ε* между![]() выражается по формуле (159 А) и
выражается по формуле (159 А) и
искажается, согласно (160 А). Угол между  остаётся
остаётся
прямым, то есть не искажается, так как он в целом ортогонален ![]() или централизованно прямой, как в варианте 2 на рис. 4А.
или централизованно прямой, как в варианте 2 на рис. 4А.
* * *
Кинематика поступательного движения материального тела в целом определяется по кинематике материальной точки - центра его инерции. Принципиальное отличие релятивистской кинематики материальной точки от нерелятивистской видно из нижеследующего сопоставления.
В пространстве-времени Лагранжа:
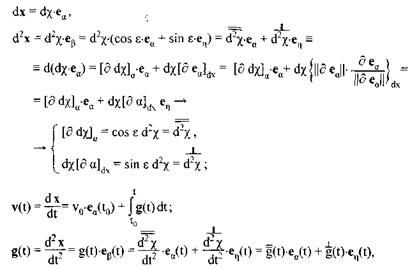

При указанном биортогональном разложении вектор еη как и ранее, вычисляется, согласно (136А). Вращение w(t) не изменяет поступательный характер движения материального тела в целом.
В пространстве-времени Минковского:
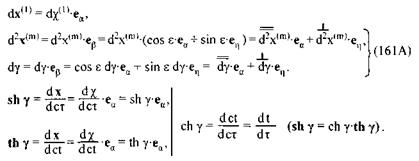
В СТО дифференциалы dx и d2x не суммируются, как выше, так как они находятся в различных![]() и подлежат гиперболическому
и подлежат гиперболическому
суммированию через углы движения γ(1) и (см. гл. 5А). При
(см. гл. 5А). При
интегральном неколлинеарном движении точечного объекта в общем случае непрерывно изменяются характеристический угол![]() (скалярное значение) и его вектор направляющих косинусов
(скалярное значение) и его вектор направляющих косинусов  Параметры исходных и интегральных углов движения представляются в
Параметры исходных и интегральных углов движения представляются в ![]() в то время как приращение угла dγ = dγ(m) (дифференциал) представляется в мгновенном базисе
в то время как приращение угла dγ = dγ(m) (дифференциал) представляется в мгновенном базисе![]() При вычислении ортопроекций этого дифференциала в
При вычислении ортопроекций этого дифференциала в![]() согласно (145А), направляющие векторы
согласно (145А), направляющие векторы
![]() выражаются условно в
выражаются условно в![]() .
.
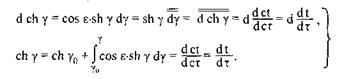
Заметим, что d2x(m) и dγ связаны через коэффициент пропорциональности dсτ, или дифференциал дуги: ![]() Имеем:
Имеем:
Причём![]() - теорема Пифагора в
- теорема Пифагора в ![]() или в
или в ![]() Напомним, что здесъ и далее, согласно (119А),
Напомним, что здесъ и далее, согласно (119А),  Соответственно в интервале 0÷π/2 все косинусные скалярные проекции положительные, а в интервале π/2÷π они же все отрицательные.
Соответственно в интервале 0÷π/2 все косинусные скалярные проекции положительные, а в интервале π/2÷π они же все отрицательные.
Из (122А) имеем:
 (162 А)
(162 А)
Из (135А) с учётом того, что ![]() имеем:
имеем:
 (163А) Из (138А) с учётом того, что
(163А) Из (138А) с учётом того, что![]() имеем:
имеем:
 (164А)
(164А)
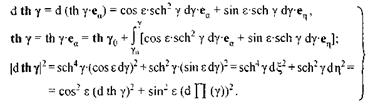
Здесь ξ и η - нормальные геодезические координаты на подвижном единичном гиперболоиде II. В этих формулах как гиперболический угол, так и направляющие векторы являются функциями соответствующего параметра движения, например τ или t.
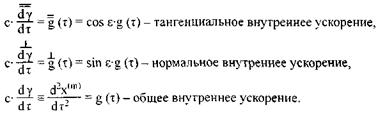
Собственная векторная скорость материальной точки выражается из (163А) в виде:
 (165А) где:
(165А) где: - тангенциальное собственное ускорение,
- тангенциальное собственное ускорение,
обобщающее (82А);
![]() - одинаковые нормальные проекции собственного и внутреннего ускорений. В отличие от
- одинаковые нормальные проекции собственного и внутреннего ускорений. В отличие от ![]() характеристики
характеристики ![]() в паре не подчиняются теореме Пифагора. Собственная скорость геометрически естественным образом представляется в квазидекартовых координатах в
в паре не подчиняются теореме Пифагора. Собственная скорость геометрически естественным образом представляется в квазидекартовых координатах в ![]() через тангенс сферического угла наклона мировой линии по отношению к
через тангенс сферического угла наклона мировой линии по отношению к ![]() или в псевдодекартовых координатах в <Р3+1> через синус гипеиболического угла наклона мировой линии по отношению к тому же
или в псевдодекартовых координатах в <Р3+1> через синус гипеиболического угла наклона мировой линии по отношению к тому же ![]() (см. рис. 2А).
(см. рис. 2А).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |
