
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (4)
(4)
Перепишем неравенство (4) в виде
 (5)
(5)
или, умножая это неравенство слева и справа на матрицу![]() и обозначая
и обозначая  в виде
в виде
![]() (6)
(6)
Теперь перед нами стоит задача нахождения пары матриц![]() удовлетворяющих матричным неравенствам (6). Рассмотрим последовательно два способа ее решения путем приведения нелинейного матричного неравенства к линейным матричным неравенствам, решаемым в пакете MATLAB.
удовлетворяющих матричным неравенствам (6). Рассмотрим последовательно два способа ее решения путем приведения нелинейного матричного неравенства к линейным матричным неравенствам, решаемым в пакете MATLAB.
Первый способ состоит в том, чтобы ввести новую матричную переменную Z=QY и записать неравенства (6) в виде линейных матричных неравенств
![]() (7)
(7)
относительно переменных Y и Z. Находя пару ![]() удовлетворяющую (7), вычислим параметры искомой обратной связи
удовлетворяющую (7), вычислим параметры искомой обратной связи  Таким образом, верно следующее.
Таким образом, верно следующее.
Утверждение 1. Объект (1) или пара (А, В) стабилизируемы тогда и только тогда, когда линейные матричные неравенства (7) разрешимы относительно переменных Y и Z. В случае стабилизируемости параметры линейной обратной связи по состоянию находятся так:
Второй способ состоит в представлении неравенства (6) в виде
![]()
с ![]() Тогда согласно утверждению 1, условия которого выполнены в силу того, что
Тогда согласно утверждению 1, условия которого выполнены в силу того, что это неравенство разрешимо относительно матрицы Θ тогда и только тогда, когда разрешимы неравенства
это неравенство разрешимо относительно матрицы Θ тогда и только тогда, когда разрешимы неравенства
 (8)
(8)
Здесь![]() обозначает матрицу, столбцы которой составляют базис ядра матрицы ВТ, т. е. матрица
обозначает матрицу, столбцы которой составляют базис ядра матрицы ВТ, т. е. матрица![]() удовлетворяет матричному уравнению
удовлетворяет матричному уравнению![]() и имеет максимальный ранг среди всех его решений. Подставляя решение Y неравенств (8) в (6), приходим к линейному матричному неравенству относительно параметров Θ, решая которое находим параметры линейной обратной связи. Итак, имеет место следующее.
и имеет максимальный ранг среди всех его решений. Подставляя решение Y неравенств (8) в (6), приходим к линейному матричному неравенству относительно параметров Θ, решая которое находим параметры линейной обратной связи. Итак, имеет место следующее.
Утверждение 2. Объект (1) стабилизируем тогда и только тогда, когда линейные матричные неравенства (8) разрешимы относительно переменной Y. В случае стабилизируемости параметры линейной обратной связи по состоянию находятся как решения линейного матричного неравенства (6) с найденным Y относительно переменной Θ.
Отметим, что с учетом леммы А.8 неравенства (8) выполняются при некоторой матрице Y тогда и только тогда, когда разрешимы линейные матричные неравенства
 (9)
(9)
относительно переменных Y и  При выполнении этих неравенств параметры регулятора могут быть выбраны в виде
При выполнении этих неравенств параметры регулятора могут быть выбраны в виде
 (10)
(10)
Пример 1 Стабилизация перевернутого маятника: объект описывается уравнением
![]()
Введем вектор![]() где
где ![]() и запишем это уравнение как
и запишем это уравнение как
![]()
т. е. в виде (1), где
В данном случае неравенства (7) принимают вид
![]() (11)
(11)
где ![]() Согласно критерию Сильвестра эти неравенства эквивалентны следующей системе нелинейных неравенств:
Согласно критерию Сильвестра эти неравенства эквивалентны следующей системе нелинейных неравенств:

решение которых представляет определенную трудность. Вместе с тем, Y и Z удовлетворяют линейным матричным неравенствам (7) и, следовательно, эти матрицы, а значит, и параметры регулятора Θ, могут быть найдены с использованием LMI Toolbox (команда feasp):

Таким образом, один из регуляторов по состоянию, который стабилизирует перевернутый маятник, задается уравнением
![]()
Решение этой задачи вторым способом предполагает нахождение матрицы ![]() т. е. матрицы максимального ранга, удовлетворяющей уравнению
т. е. матрицы максимального ранга, удовлетворяющей уравнению
![]()
Очевидно, что одним из его решений в данном случае будет
![]()
Тогда первое неравенство в (8) примет вид

Теперь, подставляя в (6) любую матрицу ![]() у которой
у которой ![]() получим линейное матричное неравенство относительно Θ. Решение этого неравенства с помощью команды feasp дает требуемый результат. Например, для
получим линейное матричное неравенство относительно Θ. Решение этого неравенства с помощью команды feasp дает требуемый результат. Например, для
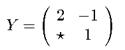
было найденс Итак, регулятор
![]()
также стабилизирует перевернутый маятник.
Конечно, в связи с этим примером может возникнуть законный вопрос: зачем нужны здесь линейные матричные неравенства, когда при линейной обратной связи 
![]() характеристический полином замкнутой системы, равный
характеристический полином замкнутой системы, равный имеет
имеет
корни слева от мнимой оси при![]() Однако, следующий пример уже не такой тривиальный, и он показывает, что линейные матричные неравенства являются эффективным средством для синтеза регуляторов.
Однако, следующий пример уже не такой тривиальный, и он показывает, что линейные матричные неравенства являются эффективным средством для синтеза регуляторов.
Пример 2. Стабилизация двухзвенного перевернутого маятника: объект описывается уравнением
Введем вектор ![]() где
где ![]() и запишем это уравнение как
и запишем это уравнение как
т. е. в виде (1), где
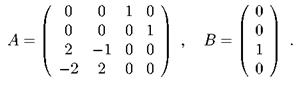
Решение задачи синтеза первым способом дало следующие результаты:
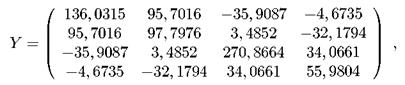

а второй способ дал ту же самую матрицу Y и
![]()
23.6.2. Одновременная стабилизация нескольких объектов
Задача одновременной стабилизации нескольких объектов заключается в построении единого регулятора, при котором цель управления достигается для каждого из этих объектов. Такая задача возникает, например, при управлении технической системой, которая может функционировать в нескольких режимах.
Пусть имеются N линейных управляемых объектов
![]() (12)
(12)
Требуется построить регулятор по состоянию и = Вх, обеспечивающий асимптотическую устойчивость всех N замкнутых систем.
Для этого достаточно установить условия существования N квадратичных функций

являющихся функциями Ляпунова для каждой из замкнутых систем, т. е. таких, что
![]() (13)
(13)
В отличие от задачи стабилизации одного объекта в данном случае не удается сформулировать конструктивные условия разрешимости системы этих неравенств. Однако, если ограничиться единой для всех N систем функцией Ляпунова, т. е. в (13) положить ![]() то такие условия могут быть получены. В такой постановке эта задача называется задачей квадратичной стабилизации нескольких объектов.
то такие условия могут быть получены. В такой постановке эта задача называется задачей квадратичной стабилизации нескольких объектов.
Для ее решения умножим обе части неравенства (13) слева и справа на ![]() обозначим
обозначим  и получим систему неравенств
и получим систему неравенств

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
