
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (11)
(11)
относительно неизвестных матриц X и Z. После того, как эти матрицы будут найдены, искомая матрица параметров регулятора находится как![]()
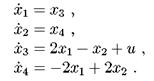
Пример 1 Модальная стабилизация двухзвенного перевернутого маятника: объект описывается уравнениями
Синтезируем регулятор по состоянию, при котором все собственные значения матрицы замкнутой системы лежат внутри круга с центром в точке  и радиусом, равным 0.1. Данная область является LMI-областью вида D2, и соответствующее линейное матричное неравенство (11) примет вид
и радиусом, равным 0.1. Данная область является LMI-областью вида D2, и соответствующее линейное матричное неравенство (11) примет вид

где
В результате были получены следующие параметры регулятора
![]()
при которых собственные значения матрицы замкнутой системы равны
![]()
23.8. Алгоритм поиска взаимнообратных матриц
Как было показано выше, синтез регуляторов во многих случаях состоит из двух этапов: поиск двух взаимнообратных матриц, удовлетворяющих линейным матричным неравенствам, и решение относительно параметров регулятора линейного матричного неравенства, в которое войдут найденные на первом этапе матрицы. При переходе от первого этапа ко второму может возникнуть следующая теоретически невозможная ситуация, когда две требуемые взаимнообратные матрицы найдены, а линейное матричное неравенство для параметров регулятора оказывается неразрешимым.
Такая ситуация может быть обусловлена недостаточной точностью, с которой вычисляются взаимнообратные матрицы. Для возможного устранения этого дефекта нужно повторить вычисления с повышенной точностью. Если и это не приводит к успеху, то вполне вероятно, что линейное матричное неравенство относительно параметров регулятора действительно не имеет решения. Проиллюстрируем это явление на простом примере.
Рассмотрим задачу стабилизации объекта
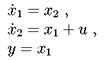
с помощью статической обратной связи по выходу ![]() Согласно утверждению 6 п. 23.6 статический регулятор по выходу существует тогда и только тогда, когда две взаимнообратные матрицы
Согласно утверждению 6 п. 23.6 статический регулятор по выходу существует тогда и только тогда, когда две взаимнообратные матрицы  удовлетворяют линейным матричным неравенствам
удовлетворяют линейным матричным неравенствам
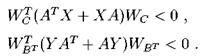 (1)
(1)
В данном случае

и, следовательно,![]()
поэтому неравенства (1) сводятся к следующим
![]()
В качестве приближённого решения этой задачи рассмотрим, например, две удовлетворяющие этим неравенствам положительно определенные матрицы

где![]() произведение которых сколь угодно близко к единичной матрице. Казалось бы, что требуемый регулятор должен существовать. Вместе с тем, как легко проверить, такого регулятора в принципе не существует. В самом деле, подставив управление в уравнения объекта, найдём, что матрица замкнутой системы ни при каком Θ не является гурвицевой.
произведение которых сколь угодно близко к единичной матрице. Казалось бы, что требуемый регулятор должен существовать. Вместе с тем, как легко проверить, такого регулятора в принципе не существует. В самом деле, подставив управление в уравнения объекта, найдём, что матрица замкнутой системы ни при каком Θ не является гурвицевой.
Кроме того, отметим, что все приводимые ниже алгоритмы весьма чувствительны к заданию начальных условий, поэтому остановка алгоритма, когда  еще не означает, что требуемого регулятора не существует. В этом случае целесообразно провести вычисления при других начальных условиях.
еще не означает, что требуемого регулятора не существует. В этом случае целесообразно провести вычисления при других начальных условиях.
Рассматриваемый ниже алгоритм предназначен для решения следующей задачи.
Задача А: найти две взаимнообратные матрицы X и  удовлетворяющие системе линейных матричных неравенств
удовлетворяющие системе линейных матричных неравенств 
 относительно X и Y.
относительно X и Y.
Для ее решения рассмотрим также другую задачу.
Задача А1: найти
![]() (2)
(2)
где ![]()
Дополнительное линейное матричное неравенство  в силу леммы Шура эквивалентно неравенству
в силу леммы Шура эквивалентно неравенству![]() Поэтому в случае, когда в задаче
Поэтому в случае, когда в задаче ![]() соответствующие матрицы X и Y являются также решением задачи А.
соответствующие матрицы X и Y являются также решением задачи А.
Для решения задачи А1 требуется минимизировать линейную функцию при ограничениях, одно из которых
 (3)
(3)
не является выпуклым и, следовательно, не может быть представлено в виде линейного матричного неравенства. Это обстоятельство не позволяет решать задачу А1 методами выпуклой оптимизации.
Далее опишем алгоритм решения задачи А1, который может быть реализован в пакете MATLAB.
Для описания алгоритма рассмотрим еще одну задачу.
Задача А2: найти
 (4)
(4)
где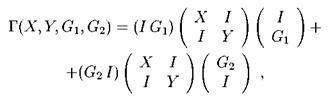
![]() - некоторые заданные матрицы.
- некоторые заданные матрицы.
Отметим, что в задаче А2 по сравнению с задачей А1 вместо неравенства (3) стоит линейное матричное неравенство  Так как
Так как
![]() (5)
(5)
и в силу неравенства ![]() выполнено
выполнено ![]() то когда
то когда ![]() соответствующие X и Y являются решением задачи А (при этом
соответствующие X и Y являются решением задачи А (при этом ![]() и
и 
Алгоритм состоит из следующих шагов:
1. j = 0.
2. Фиксируются матрицы ![]()
3. Решается задача А2 с помощью команды mincx пакета MATLAB и находятся
![]()
4. Задаются и ![]() осуществляется переход к шагу 2 при
осуществляется переход к шагу 2 при 
Утверждение 1. Для любых начальных ![]() последовательность
последовательность ![]() генерируемая алгоритмом, является неубывающей и существуют следующие пределы
генерируемая алгоритмом, является неубывающей и существуют следующие пределы
![]()
Доказательство. Оценим, как будет меняться спектральный радиус матрицы ![]() по траектории алгоритма. Представим
по траектории алгоритма. Представим
![]()
в виде
Выражение в первых квадратных скобках неположительно в силу алгоритма, поскольку на ![]() -й итерации
-й итерации ![]() принимает минимальное значение при
принимает минимальное значение при ![]() Рассмотрим разность двух матриц, фигурирующих во вторых квадратных скобках. Из (5) следует, что
Рассмотрим разность двух матриц, фигурирующих во вторых квадратных скобках. Из (5) следует, что

Учитывая, что ![]() получим
получим
![]()
Так как из ![]() следует, что
следует, что ![]() то в результате получим
то в результате получим ![]() В этом случае последовательность
В этом случае последовательность ![]() ограничена снизу и не возрастает, откуда с учетом непрерывности функции спектрального радиуса следует существование указанных в теореме пределов.
ограничена снизу и не возрастает, откуда с учетом непрерывности функции спектрального радиуса следует существование указанных в теореме пределов.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
