
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пример 6. Стабилизация по выходу двухзвенного перевернутого маятника с помощью наблюдателя Люенбергера: объект описывается уравнениями (см. также пример 5)
Синтезируем динамический регулятор по выходу третьего порядка на основе наблюдателя Люенбергера.
В данном случае
Представим
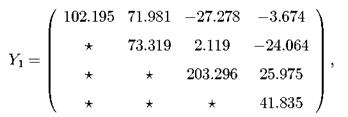
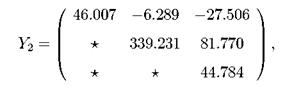
Решение линейных матричных неравенств (49) дает следующие результаты
![]()
![]()
откуда находим
Таким образом, искомый регулятор описывается уравнениями
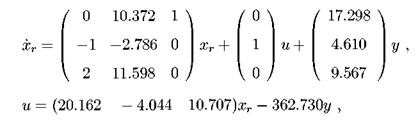
и матрица замкнутой системы имеет собственные значения

лежащие слева от мнимой оси.
23.6.5. Стабилизация дискретных объектов
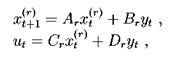
Рассмотрим дискретный управляемый объект
![]() (50)
(50)
в котором![]() - состояние,
- состояние, ![]() - управление,
- управление, ![]() - измеряемый выход. Требуется построить линейный динамический регулятор k-го порядка вида
- измеряемый выход. Требуется построить линейный динамический регулятор k-го порядка вида
 (51)
(51)
где ![]() - состояние регулятора, обеспечивающий асимптотическую устойчивость замкнутой системы (50), (51).
- состояние регулятора, обеспечивающий асимптотическую устойчивость замкнутой системы (50), (51).
Представим уравнение замкнутой системы (50), (51) в виде

где ![]() Переформулируем цель управления в виде существования квадратичной функции Ляпунова
Переформулируем цель управления в виде существования квадратичной функции Ляпунова  такой, что по любой
такой, что по любой
траектории замкнутой системы имеет место

Это условие эквивалентно следующему матричному неравенству
![]()
которое с учетом леммы А.2 представимо в виде
 (52)
(52)
Вводя матрицу параметров регулятора
и представляя матрицу замкнутой системы в виде
перепишем неравенство (52) в виде линейного матричного неравенства относительно неизвестных параметров Θ
 (53)
(53)
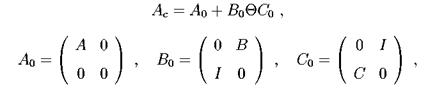
в котором
 (54)
(54)
Так как в этом случае

то, применяя утверждение 23.4.2, приходим к справедливости следующего.
Утверждение 9. Дискретный объект (50) стабилизируем с помощью регулятора по выходу (51) заданного порядка тогда и только тогда, когда существует ![]()
![]() -матрица
-матрица ![]() удовлетворяющая следующим условиям:
удовлетворяющая следующим условиям:
 (55)
(55)
Если условия (55) выполнены и такая матрица X найдена, то параметры искомого регулятора (51) находятся как решения линейного матричного неравенства (53).
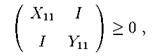
Введем матрицу![]() и перепишем условия (55) в виде линейных матричных неравенств относительно матриц X и Y:
и перепишем условия (55) в виде линейных матричных неравенств относительно матриц X и Y:
 (56)
(56)
Тогда рассматриваемая задача сводится к поиску взаимнообратных матриц X и Y (XY = I), удовлетворяющих неравенствам (56), т. е. к задаче А, сформулированной выше.
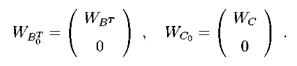
Так как

и матрицы максимального ранга ![]() и
и ![]() должны удовлетворять уравнениям
должны удовлетворять уравнениям ![]()
![]() и
и  соответственно, то непосредственно проверяется, что можно взять
соответственно, то непосредственно проверяется, что можно взять
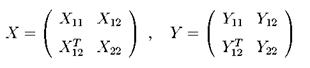
Тогда с учетом блочной структуры матриц![]() и соответствующего блочного представления матриц X и Y в виде
и соответствующего блочного представления матриц X и Y в виде
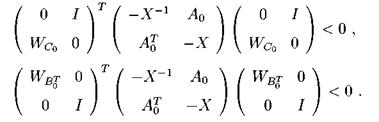
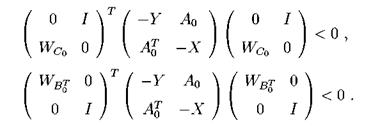
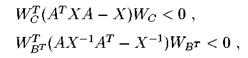
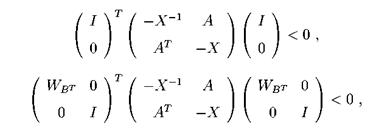
неравенства (56) приводятся к виду
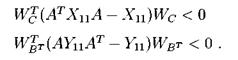 (57)
(57)
Таким образом, задача синтеза регуляторов по выходу для дискретных объектов может быть также сведена к сформулированной выше задаче В: найти две )-матрицы
)-матрицы

удовлетворяющие линейным матричным неравенствам (57) и
и условию 
или установить, что таких матриц не существует.
Для статического регулятора по выходу в уравнениях регулятора (51) имеем![]()
![]() и, следовательно,
и, следовательно,

В этом случае неравенство (52) примет вид (53), где

Тогда условия стабилизируемости (55) примут вид
где X - матрица порядка и формулировка задачи А совпадает с формулировкой задачи В.
и формулировка задачи А совпадает с формулировкой задачи В.
В частности, когда состояние объекта полностью измеряется, т. е. С =I и rank (0 С) = пх, неравенство (52) примет вид (53), в котором

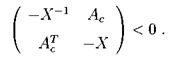
Условия стабилизируемости (55) в этом случае сводятся к выполнимости двух неравенств
 (58) первое из которых дает
(58) первое из которых дает![]() а второе по лемме Шура эквивалентно неравенству
а второе по лемме Шура эквивалентно неравенству
![]()
Таким образом, с учетом утверждения 23.4.2 получим, что объект (50) стабилизируем по состоянию тогда и только тогда, когда неравенство
![]()
разрешимо относительно положительно определенной матрицы 
23.7. Модальное управление
Задача модального управления связана с построением регулятора, при котором полюса замкнутой системы располагаются в заданных точках или заданных областях комплексной плоскости. Значения таких характеристик замкнутой системы как время переходного процесса, демпфирование, скорость переходных процессов в регуляторе и других определяются расположением собственных значений матрицы замкнутой системы в определенных областях комплексной плоскости. Здесь мы будем рассматривать задачи модального управления относительно таких областей, которые могут быть характеризованы системой линейных матричных неравенств - такие области в дальнейшем будем называть LMІ-областями. Мы увидим, что к этим областям относятся вертикальные и горизонтальные полосы, круги, конические секторы, а также пересечения таких областей.
23.7.1. LMI-области
Пусть D - некоторая область левой комплексной полуплоскости. Динамическую систему![]() будем называть D-устойчивой, если все ее полюса, т. е. все собственные значения матрицы А, лежат в области D. В этом случае матрицу А также будем называть D-устойчивой. В частном случае, когда D совпадает со всей левой комплексной полуплоскостью, D-устойчивость сводится к асимптотической устойчивости, которая характеризуется неравенством Ляпунова, являющимся линейным матричным неравенством. А именно, матрица А асимптотически устойчива тогда и только тогда, когда существует симметрическая матрица X, удовлетворяющая неравенствам
будем называть D-устойчивой, если все ее полюса, т. е. все собственные значения матрицы А, лежат в области D. В этом случае матрицу А также будем называть D-устойчивой. В частном случае, когда D совпадает со всей левой комплексной полуплоскостью, D-устойчивость сводится к асимптотической устойчивости, которая характеризуется неравенством Ляпунова, являющимся линейным матричным неравенством. А именно, матрица А асимптотически устойчива тогда и только тогда, когда существует симметрическая матрица X, удовлетворяющая неравенствам

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
