
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
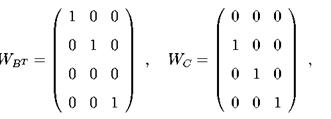
Пример 5. Стабилизация по выходу двухзвенного перевернутого маятника регулятором полного порядка: объект описывается уравнениями (см. также примеры 2 и 4)
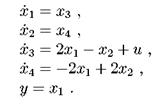
Синтезируем динамический регулятор полного (четвертого) порядка по углу отклонения нижнего маятника.
В данном случае неизвестными элементами матрицы Θ являются двадцать пять параметров регулятора, являющихся элементами матриц
![]() Они могут быть найдены как решение линейного матричного неравенства (26) относительно Θ, в котором матрицы
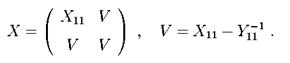
Они могут быть найдены как решение линейного матричного неравенства (26) относительно Θ, в котором матрицы ![]() определены в (32), а блочная матрица X вида (33) порядка 8×8 находится следующим образом. Решается система линейных матричных неравенств (34) и (38), где
определены в (32), а блочная матрица X вида (33) порядка 8×8 находится следующим образом. Решается система линейных матричных неравенств (34) и (38), где
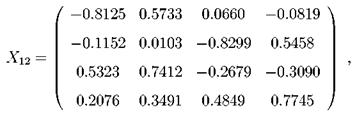
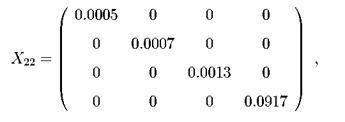
относительно неизвестных матриц Х11 и Y11 порядков 4×4 и далее матрицы Х12 и Х22 определяются согласно формулам (39). Для данного примера были получены следующие результаты
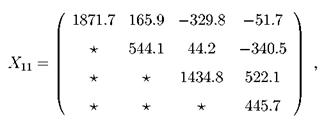
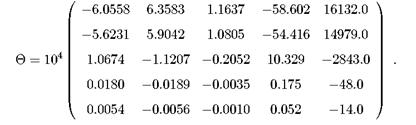
В данном случае матрица замкнутой системы имеет следующие собственные значения

лежащие слева от мнимой оси.
Полученный регулятор содержит большие по величине коэффициенты, что затрудняет его практическую реализацию. Существует возможность построить регулятор, матрица Θ которого имеет минимальную норму. В этом случае следует использовать команду
![]()
В рассматриваемом примере это приводит к следующему результату
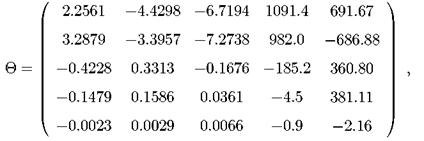
и тогда матрица замкнутой системы будет иметь следующие собственные значения

Рассмотрим ещё один важный частный случай - стабилизация с помощью статического регулятора по выходу. В этом случае в уравнениях регулятора (19) имеем

условие (38) автоматически выполняется, и формулировка задачи А совпадает с формулировкой задачи В.
Утверждение 6. Объект (18) стабилизируем с помощью статического регулятора по выходу тогда и только тогда, когда существуют две взаимнообратные (пх×пх)-матрицы ![]() удовлетворяющие линейным матричным неравенствам
удовлетворяющие линейным матричным неравенствам
 (41)
(41)
23.6.4. Стабилизация с использованием наблюдателей
Рассмотрим ещё один подход к синтезу стабилизирующих регуляторов по измеряемому выходу, основанный на построении наблюдателей состояния объекта. Начнём с наблюдателя полного порядка. Для управляемого объекта
 (42)
(42)
в котором![]() - состояние,
- состояние,![]() - управление,
- управление,![]() - измеряемый выход, выберем регулятор в форме наблюдателя состояния полного порядка
- измеряемый выход, выберем регулятор в форме наблюдателя состояния полного порядка
 (43)
(43)
где ![]() - состояние регулятора. Требуется определить матрицы К и L так, чтобы замкнутая система (42), (43) была асимптотически устойчивой.
- состояние регулятора. Требуется определить матрицы К и L так, чтобы замкнутая система (42), (43) была асимптотически устойчивой.
Введем вектор невязки ![]() и в качестве состояния замкнутой системы выберем вектор col (x, е), который удовлетворяет уравнению
и в качестве состояния замкнутой системы выберем вектор col (x, е), который удовлетворяет уравнению
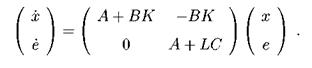
Для асимптотической устойчивости этой системы необходимо и достаточно, чтобы матрицы А + ВК и А + LC были гурвицевы или, другими словами, чтобы пары матриц (А, В) и  были стабилизируемы. Применяя теперь утверждение 1, в которомна языке линейных матричных неравенств приведен критерий стабилизируемости и дана параметризация всех обратных связей, стабилизирующих данную пару, приходим к следующему результату.
были стабилизируемы. Применяя теперь утверждение 1, в которомна языке линейных матричных неравенств приведен критерий стабилизируемости и дана параметризация всех обратных связей, стабилизирующих данную пару, приходим к следующему результату.
Утверждение 7. Объект (42) стабилизируем с помощью регулятора по выходу вида (43) тогда и только тогда, когда линейные матричные неравенства
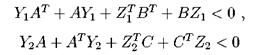 (44)
(44)
разрешимы относительно переменных![]() и
и
В случае разрешимости этих неравенств параметры регулятора находятся следующим образом
Теперь синтезируем регулятор на основе наблюдателя Люенбергера. Пусть в объекте управления (42) ранг матрицы С равен  Обозначим
Обозначим 
Напомним необходимые сведения из теории наблюдателей Люенбергера.
Рассмотрим наблюдатель
 (45)
(45)
где ![]() - состояние наблюдателя, у и и - измеряемый выход и управление в объекте (42), а матрицы F, Т и Q удовлетворяют матричному уравнению
- состояние наблюдателя, у и и - измеряемый выход и управление в объекте (42), а матрицы F, Т и Q удовлетворяют матричному уравнению
 (46)
(46)
Введём вектор ![]() и заметим, что в силу уравнений объекта и наблюдателя для него выполняется
и заметим, что в силу уравнений объекта и наблюдателя для него выполняется
![]()
Таким образом, если матрица F гурвицева, то вектор z асимптотически отслеживает вектор Тх и в совокупности с вектором у даёт оценку вектора состояния объекта. Не умаляя общности, примем, что
![]()
Это всегда может быть достигнуто путём соответствующей замены переменных. Разобьём матрицы А и В на блоки
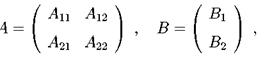
где ![]() -матрица, а
-матрица, а ![]() -матрица (порядки остальных блоков определяются единственным образом). Выберем матрицы
-матрица (порядки остальных блоков определяются единственным образом). Выберем матрицы ![]() удовлетворяющие уравнению (46), следующим образом
удовлетворяющие уравнению (46), следующим образом
![]() (47)
(47)
где матрицу L следует определить из условия, что матрица F гурвицева. Заметим, что это возможно тогда и только тогда, когда пара  стабилизируема.
стабилизируема.
В соответствии со сделанным выбором возьмём регулятор в виде
![]() (48)
(48)
где матрицы К1 и К2 подлежат определению из условия асимптотической устойчивости замкнутой системы (42), (48). Подставляя управление в исходную систему и учитывая, что![]() получим
получим
где ![]()
Таким образом, матрица К находится из условия, что матрица А + ВК должна быть гурвицевой, а затем с учётом уже найденной матрицы L определяются матрицы регулятора K1 и К2.
Применяя теперь снова утверждение 1, приходим к следующему результату.
Утверждение 8. Объект (42) стабилизируем с помощью регулятора по выходу пониженного порядка вида (48) тогда и только тогда, когда линейные матричные неравенства
 (49)
(49)
разрешимы относительно переменных ![]() и
и ![]() В случае разрешимости этих неравенств параметры регулятора находятся следующим образом
В случае разрешимости этих неравенств параметры регулятора находятся следующим образом
Таким образом, применение наблюдателя Люенбергера позволяет осуществлять синтез регуляторов по выходу пониженного порядка на основе решения только линейных матричных неравенств.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
