
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тогда рассматриваемая проблема синтеза стабилизирующих регуляторов по выходу заданного порядка сводится к задаче А: найти две взаимнообратные  матрицы
матрицы  удовлетворяющие линейным матричным неравенствам (31), или установить, что таких матриц не существует.
удовлетворяющие линейным матричным неравенствам (31), или установить, что таких матриц не существует.
Далее будут приведены алгоритмы решения задачи А, применение которых позволяет синтезировать регуляторы по выходу.
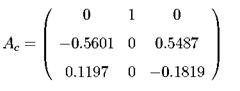
Пример 3. Стабилизация по выходу перевернутого маятника: объект описывается уравнениями (см. также пример 1)
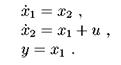
Требуется синтезировать динамический регулятор по выходу первого порядка вида (19).
В данном случае неизвестными элементами матрицы Θ являются четыре параметра регулятора:  Они могут быть найдены как решение линейного матричного неравенства (26) относительно в, в котором
Они могут быть найдены как решение линейного матричного неравенства (26) относительно в, в котором
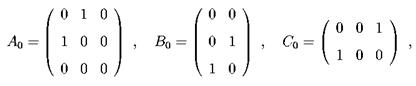 а матрица X порядка 3×3 в свою очередь должна удовлетворять системе неравенств (30), где
а матрица X порядка 3×3 в свою очередь должна удовлетворять системе неравенств (30), где
Для поиска требуемой матрицы X применялся алгоритм нахождения взаимнообратных матриц, удовлетворяющих системе линейных матричных неравенств (31). В результате были получены
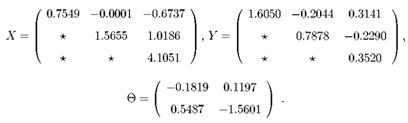
Таким образом, искомый регулятор описывается уравнениями
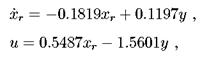
и матрица замкнутой системы
имеет собственные значения
![]()
лежащие слева от мнимой оси.
Пример 4. Стабилизация по выходу двухзвенного перевернутого маятника:
объект описывается уравнениями (см. также пример 2)
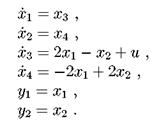
Требуется синтезировать динамический регулятор по выходу первого порядка вида (19). В данном случае неизвестными элементами матрицы Θ являются шесть параметров регулятора: ![]() Они могут быть найдены как решение линейного матричного неравенства (26) относительно Θ, в котором
Они могут быть найдены как решение линейного матричного неравенства (26) относительно Θ, в котором
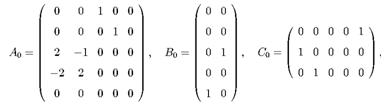 (32) а матрица X порядка 5×5 удовлетворяет системе неравенств (30), где
(32) а матрица X порядка 5×5 удовлетворяет системе неравенств (30), где
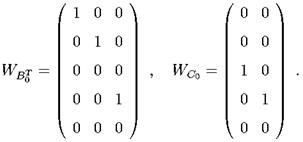
Для поиска требуемой матрицы X применялся алгоритм нахождения взаимнообратных матриц, удовлетворяющих системе линейных матричных неравенств (31). В результате были получены
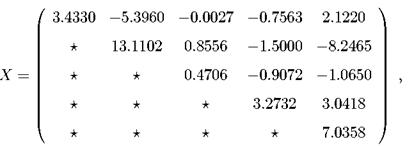
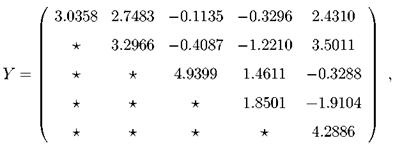

Таким образом, искомый регулятор описывается уравнениями

и матрица замкнутой системы имеет собственные значения
![]()
лежащие слева от мнимой оси.
Возможен и другой путь использования условий (31) для синтеза стабилизирующих регуляторов. Так как

и матрицы максимального ранга ![]() и
и ![]() должны удовлетворять уравнениям
должны удовлетворять уравнениям 
![]() и
и  соответственно, то непосредственно проверяется, что мы можем взять
соответственно, то непосредственно проверяется, что мы можем взять
В соответствии с блочной структурой матрицы
представим матрицы X и Y в блочном виде
 (33)
(33)
Тогда неравенства (31) примут вид
 (34)
(34)
Заметим, что в силу критерия Сильвестра из условий ![]() и
и ![]() 0 следует
0 следует ![]() и
и![]() Таким образом, возникает задача о нахождении положительно определенных матриц Х11 и Y11, удовлетворяющих линейным матричным неравенствам (34) и являющихся соответствующими блоками взаимнообратных положительно определенных матриц X и Y.
Таким образом, возникает задача о нахождении положительно определенных матриц Х11 и Y11, удовлетворяющих линейным матричным неравенствам (34) и являющихся соответствующими блоками взаимнообратных положительно определенных матриц X и Y.
Распишем условие![]() в блочном виде
в блочном виде
 (35)
(35)
Из первого уравнения получим
![]()
Так как ранг каждой из матриц в правой части этого равенства не превышает k и, следовательно, ранг произведения этих матриц также не превышает k, то отсюда следует условие
![]() (36)
(36)
Далее, из формулы Фробениуса для обращения блочной матрицы (см. лемму А.1), следует, что должно выполняться следующее равенство
![]() (37)
(37)
Отсюда вытекает неравенство![]()
которое в силу леммы А. З выражается в виде линейного матричного неравенства
 (38)
(38)
Оказывается (см. лемму А.7), что условия![]() (36) и (38) являются необходимыми и достаточными условиями существования взаимнообратных матриц
(36) и (38) являются необходимыми и достаточными условиями существования взаимнообратных матриц ![]() с данными блоками
с данными блоками ![]() В доказательстве леммы А.7 также показано, как при выполнении указанных условий по данным блокам
В доказательстве леммы А.7 также показано, как при выполнении указанных условий по данным блокам ![]() получить соответствующую матрицу X. А именно, применяя лемму А.6 о сингулярном разложении и учитывая, что матрица
получить соответствующую матрицу X. А именно, применяя лемму А.6 о сингулярном разложении и учитывая, что матрица  симметрическая и неотрицательно определенная, представим
симметрическая и неотрицательно определенная, представим

где![]() Правую часть этого равенства запишем эквивалентно в виде
Правую часть этого равенства запишем эквивалентно в виде

и выберем
![]() (39)
(39)
Затем выбранная матрица X подставляется в (26), и параметры искомого регулятора находятся как решения этого линейного матричного неравенства относительно Θ.
Таким образом, синтез стабилизирующих регуляторов по выходу заданного порядка может быть также осуществлен в результате решения задачи В: найти две ![]() матрицы
матрицы ![]() удовлетворяющие линейным матричным неравенствам (34) и (38), а также условию (36), или установить, что таких матриц не существует.
удовлетворяющие линейным матричным неравенствам (34) и (38), а также условию (36), или установить, что таких матриц не существует.
Рассмотрим отдельно важный частный случай стабилизирующего регулятора полного порядка, т. е. когда![]() Очевидно, что тогда условие (36) всегда выполнено. Следовательно, в этом случае рассматриваемая задача связана только с решениями линейных матричных неравенств, а потому является задачей выпуклого программирования. А именно, имеет место следующее.
Очевидно, что тогда условие (36) всегда выполнено. Следовательно, в этом случае рассматриваемая задача связана только с решениями линейных матричных неравенств, а потому является задачей выпуклого программирования. А именно, имеет место следующее.
Утверждение 5. Объект (18) стабилизируем с помощью регулятора по выходу (19) полного порядка k = пх тогда и только тогда, когда существуют две  матрицы
матрицы  удовлетворяющие линейным матричным неравенствам
удовлетворяющие линейным матричным неравенствам
 (40)
(40)
Заметим, что равенство (37) может быть также обеспечено при выборе, например, ![]() и в этом случае
и в этом случае ![]() Таким образом, если условия (40) выполнены, матрицы Х11 и Y11 найдены и
Таким образом, если условия (40) выполнены, матрицы Х11 и Y11 найдены и  то параметры Θ регулятора полного порядка могут быть найдены как решения линейного матричного неравенства (26), в котором
то параметры Θ регулятора полного порядка могут быть найдены как решения линейного матричного неравенства (26), в котором

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
